For many differentially private algorithms, such as the prominent noisy stochastic gradient descent (DP-SGD), the analysis needed to bound the privacy leakage of a single training run is well understood. However, few studies have reasoned about the privacy leakage resulting from the multiple training runs needed to fine tune the value of the training algorithm’s hyperparameters. In this work, we first illustrate how simply setting hyperparameters based on non-private training runs can leak private information. Motivated by this observation, we then provide privacy guarantees for hyperparameter search procedures within the framework of Renyi Differential Privacy. Our results improve and extend the work of Liu and Talwar (STOC 2019). Our analysis supports our previous observation that tuning hyperparameters does indeed leak private information, but we prove that, under certain assumptions, this leakage is modest, as long as each candidate training run needed to select hyperparameters is itself differentially private.
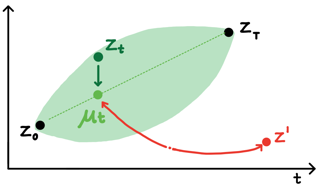
Modern language models can generate high-quality short texts. However, they often meander or are incoherent when generating longer texts. These issues arise from the next-token-only language modeling objective. To address these issues, we introduce Time Control (TC), a language model that implicitly plans via a latent stochastic process. TC does this by learning a representation which maps the dynamics of how text changes in a document to the dynamics of a stochastic process of interest. Using this representation, the language model can generate text by first implicitly generating a document plan via a stochastic process, and then generating text that is consistent with this latent plan. Compared to domain-specific methods and fine-tuning GPT2 across a variety of text domains, TC improves performance on text infilling and discourse coherence. On long text generation settings, TC preserves the text structure both in terms of ordering (up to +40% better) and text length consistency (up to +17% better). Human evaluators also prefer TC's output 28.6% more than the baselines.

Musical expression requires control of both what notes that are played, and how they are performed. Conventional audio synthesizers provide detailed expressive controls, but at the cost of realism. Black-box neural audio synthesis and concatenative samplers can produce realistic audio, but have few mechanisms for control. In this work, we introduce MIDI-DDSP a hierarchical model of musical instruments that enables both realistic neural audio synthesis and detailed user control. Starting from interpretable Differentiable Digital Signal Processing (DDSP) synthesis parameters, we infer musical notes and high-level properties of their expressive performance (such as timbre, vibrato, dynamics, and articulation). This creates a 3-level hierarchy (notes, performance, synthesis) that affords individuals the option to intervene at each level, or utilize trained priors (performance given notes, synthesis given performance) for creative assistance. Through quantitative experiments and listening tests, we demonstrate that this hierarchy can reconstruct high-fidelity audio, accurately predict performance attributes for a note sequence, independently manipulate the attributes of a given performance, and as a complete system, generate realistic audio from a novel note sequence. By utilizing an interpretable hierarchy, with multiple levels of granularity, MIDI-DDSP opens the door to assistive tools to empower individuals across a diverse range of musical experience.
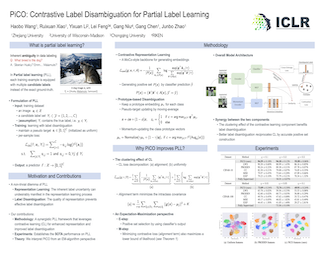
Partial label learning (PLL) is an important problem that allows each training example to be labeled with a coarse candidate set, which well suits many real-world data annotation scenarios with label ambiguity. Despite the promise, the performance of PLL often lags behind the supervised counterpart. In this work, we bridge the gap by addressing two key research challenges in PLL---representation learning and label disambiguation---in one coherent framework. Specifically, our proposed framework PiCO consists of a contrastive learning module along with a novel class prototype-based label disambiguation algorithm. PiCO produces closely aligned representations for examples from the same classes and facilitates label disambiguation. Theoretically, we show that these two components are mutually beneficial, and can be rigorously justified from an expectation-maximization (EM) algorithm perspective. Extensive experiments demonstrate that PiCO significantly outperforms the current state-of-the-art approaches in PLL and even achieves comparable results to fully supervised learning. Code and data available: https://github.com/hbzju/PiCO.
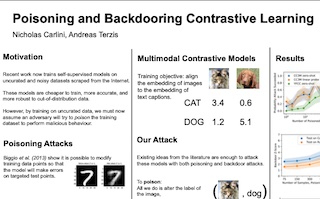
Multimodal contrastive learning methods like CLIP train on noisy and uncurated training datasets. This is cheaper than labeling datasets manually, and even improves out-of-distribution robustness. We show that this practice makes backdoor and poisoning attacks a significant threat. By poisoning just 0.01% of a dataset (e.g., just 300 images of the 3 million-example Conceptual Captions dataset), we can cause the model to misclassify test images by overlaying a small patch. Targeted poisoning attacks, whereby the model misclassifies a particular test input with an adversarially-desired label, are even easier requiring control of 0.0001% of the dataset (e.g., just three out of the 3 million images). Our attacks call into question whether training on noisy and uncurated Internet scrapes is desirable.
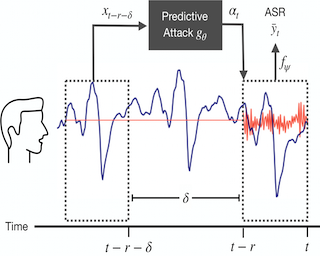
Automatic speech recognition systems have created exciting possibilities for applications, however they also enable opportunities for systematic eavesdropping.We propose a method to camouflage a person's voice from these systems without inconveniencing the conversation between people in the room. Standard adversarial attacks are not effective in real-time streaming situations because the characteristics of the signal will have changed by the time the attack is executed. We introduce predictive adversarial attacks, which achieves real-time performance by forecasting the attack vector that will be the most effective in the future. Under real-time constraints, our method jams the established speech recognition system DeepSpeech 3.9x more than online projected gradient descent as measured through word error rate, and 6.6x more as measured through character error rate. We furthermore demonstrate our approach is practically effective in realistic environments with complex scene geometries.

An agent's functionality is largely determined by its design, i.e., skeletal structure and joint attributes (e.g., length, size, strength). However, finding the optimal agent design for a given function is extremely challenging since the problem is inherently combinatorial and the design space is prohibitively large. Additionally, it can be costly to evaluate each candidate design which requires solving for its optimal controller. To tackle these problems, our key idea is to incorporate the design procedure of an agent into its decision-making process. Specifically, we learn a conditional policy that, in an episode, first applies a sequence of transform actions to modify an agent's skeletal structure and joint attributes, and then applies control actions under the new design. To handle a variable number of joints across designs, we use a graph-based policy where each graph node represents a joint and uses message passing with its neighbors to output joint-specific actions. Using policy gradient methods, our approach enables joint optimization of agent design and control as well as experience sharing across different designs, which improves sample efficiency substantially. Experiments show that our approach, Transform2Act, outperforms prior methods significantly in terms of convergence speed and final performance. Notably, Transform2Act can automatically discover plausible …

Our work focuses on the development of a learnable neural representation of human pose for advanced AI assisted animation tooling. Specifically, we tackle the problem of constructing a full static human pose based on sparse and variable user inputs (e.g. locations and/or orientations of a subset of body joints). To solve this problem, we propose a novel neural architecture that combines residual connections with prototype encoding of a partially specified pose to create a new complete pose from the learned latent space. We show that our architecture outperforms a baseline based on Transformer, both in terms of accuracy and computational efficiency. Additionally, we develop a user interface to integrate our neural model in Unity, a real-time 3D development platform. Furthermore, we introduce two new datasets representing the static human pose modeling problem, based on high-quality human motion capture data, which will be released publicly along with model code.
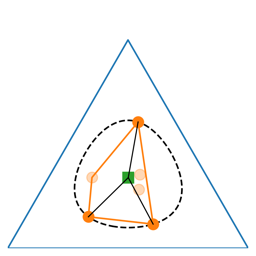
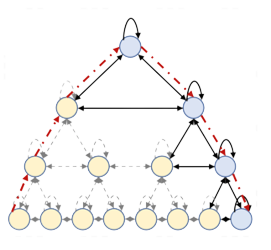
How can a reinforcement learning (RL) agent prepare to solve downstream tasks if those tasks are not known a priori? One approach is unsupervised skill discovery, a class of algorithms that learn a set of policies without access to a reward function. Such algorithms bear a close resemblance to representation learning algorithms (e.g., contrastive learning) in supervised learning, in that both are pretraining algorithms that maximize some approximation to a mutual information objective. While prior work has shown that the set of skills learned by such methods can accelerate downstream RL tasks, prior work offers little analysis into whether these skill learning algorithms are optimal, or even what notion of optimality would be appropriate to apply to them. In this work, we show that unsupervised skill discovery algorithms based on mutual information maximization do not learn skills that are optimal for every possible reward function. However, we show that the distribution over skills provides an optimal initialization minimizing regret against adversarially-chosen reward functions, assuming a certain type of adaptation procedure. Our analysis also provides a geometric perspective on these skill learning methods.
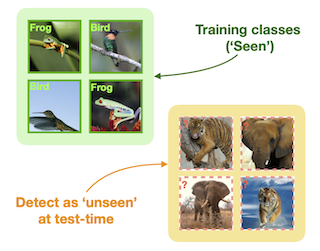
The ability to identify whether or not a test sample belongs to one of the semantic classes in a classifier's training set is critical to practical deployment of the model. This task is termed open-set recognition (OSR) and has received significant attention in recent years. In this paper, we first demonstrate that the ability of a classifier to make the 'none-of-above' decision is highly correlated with its accuracy on the closed-set classes. We find that this relationship holds across loss objectives and architectures, and further demonstrate the trend both on the standard OSR benchmarks as well as on a large-scale ImageNet evaluation. Second, we use this correlation to boost the performance of the maximum softmax probability OSR 'baseline' by improving its closed-set accuracy, and with this strong baseline achieve state-of-the-art on a number of OSR benchmarks. Similarly, we boost the performance of the existing state-of-the-art method by improving its closed-set accuracy, but the resulting discrepancy with the strong baseline is marginal. Our third contribution is to present the 'Semantic Shift Benchmark' (SSB), which better respects the task of detecting semantic novelty, as opposed to low-level distributional shifts as tackled by neighbouring machine learning fields. On this new evaluation, we again …
Many real-world applications of reinforcement learning (RL) require the agent to deal with high-dimensional observations such as those generated from a megapixel camera. Prior work has addressed such problems with representation learning, through which the agent can provably extract endogenous, latent state information from raw observations and subsequently plan efficiently. However, such approaches can fail in the presence of temporally correlated noise in the observations, a phenomenon that is common in practice. We initiate the formal study of latent state discovery in the presence of such exogenous noise sources by proposing a new model, the Exogenous Block MDP (EX-BMDP), for rich observation RL. We start by establishing several negative results, by highlighting failure cases of prior representation learning based approaches. Then, we introduce the Predictive Path Elimination (PPE) algorithm, that learns a generalization of inverse dynamics and is provably sample and computationally efficient in EX-BMDPs when the endogenous state dynamics are near deterministic. The sample complexity of PPE depends polynomially on the size of the latent endogenous state space while not directly depending on the size of the observation space, nor the exogenous state space. We provide experiments on challenging exploration problems which show that our approach works empirically.
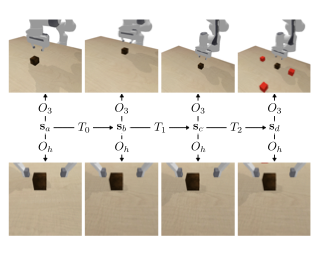
We study how the choice of visual perspective affects learning and generalization in the context of physical manipulation from raw sensor observations. Compared with the more commonly used global third-person perspective, a hand-centric (eye-in-hand) perspective affords reduced observability, but we find that it consistently improves training efficiency and out-of-distribution generalization. These benefits hold across a variety of learning algorithms, experimental settings, and distribution shifts, and for both simulated and real robot apparatuses. However, this is only the case when hand-centric observability is sufficient; otherwise, including a third-person perspective is necessary for learning, but also harms out-of-distribution generalization. To mitigate this, we propose to regularize the third-person information stream via a variational information bottleneck. On six representative manipulation tasks with varying hand-centric observability adapted from the Meta-World benchmark, this results in a state-of-the-art reinforcement learning agent operating from both perspectives improving its out-of-distribution generalization on every task. While some practitioners have long put cameras in the hands of robots, our work systematically analyzes the benefits of doing so and provides simple and broadly applicable insights for improving end-to-end learned vision-based robotic manipulation.
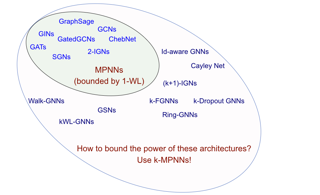
Characterizing the separation power of graph neural networks (GNNs) provides an understanding of their limitations for graph learning tasks. Results regarding separation power are, however, usually geared at specific GNNs architectures, and tools for understanding arbitrary GNN architectures are generally lacking. We provide an elegant way to easily obtain bounds on the separation power of GNNs in terms of the Weisfeiler-Leman (WL) tests, which have become the yardstick to measure the separation power of GNNs. The crux is to view GNNs as expressions in a procedural tensor language describing the computations in the layers of the GNNs. Then, by a simple analysis of the obtained expressions, in terms of the number of indexes used and the nesting depth of summations, bounds on the separation power in terms of the WL-tests readily follow. We use tensor language to define Higher-Order Message-Passing Neural Networks (or k-MPNNs), a natural extension of MPNNs. Furthermore, the tensor language point of view allows for the derivation of universality results for classes of GNNs in a natural way. Our approach provides a toolbox with which GNN architecture designers can analyze the separation power of their GNNs, without needing to know the intricacies of the WL-tests. We also …
Learning causal relationships in high-dimensional data (images, videos) is a hard task, as they are often defined on low dimensional manifolds and must be extracted from complex signals dominated by appearance, lighting, textures and also spurious correlations in the data. We present a method for learning counterfactual reasoning of physical processes in pixel space, which requires the prediction of the impact of interventions on initial conditions. Going beyond the identification of structural relationships, we deal with the challenging problem of forecasting raw video over long horizons. Our method does not require the knowledge or supervision of any ground truth positions or other object or scene properties. Our model learns and acts on a suitable hybrid latent representation based on a combination of dense features, sets of 2D keypoints and an additional latent vector per keypoint. We show that this better captures the dynamics of physical processes than purely dense or sparse representations. We introduce a new challenging and carefully designed counterfactual benchmark for predictions in pixel space and outperform strong baselines in physics-inspired ML and video prediction.

As Artificial Intelligence as a Service gains popularity, protecting well-trained models as intellectual property is becoming increasingly important. There are two common types of protection methods: ownership verification and usage authorization. In this paper, we propose Non-Transferable Learning (NTL), a novel approach that captures the exclusive data representation in the learned model and restricts the model generalization ability to certain domains. This approach provides effective solutions to both model verification and authorization. Specifically: 1) For ownership verification, watermarking techniques are commonly used but are often vulnerable to sophisticated watermark removal methods. By comparison, our NTL-based ownership verification provides robust resistance to state-of-the-art watermark removal methods, as shown in extensive experiments with 6 removal approaches over the digits, CIFAR10 & STL10, and VisDA datasets. 2) For usage authorization, prior solutions focus on authorizing specific users to access the model, but authorized users can still apply the model to any data without restriction. Our NTL-based authorization approach instead provides data-centric protection, which we call applicability authorization, by significantly degrading the performance of the model on unauthorized data. Its effectiveness is also shown through experiments on aforementioned datasets.
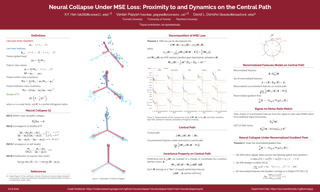
The recently discovered Neural Collapse (NC) phenomenon occurs pervasively in today's deep net training paradigm of driving cross-entropy (CE) loss towards zero. During NC, last-layer features collapse to their class-means, both classifiers and class-means collapse to the same Simplex Equiangular Tight Frame, and classifier behavior collapses to the nearest-class-mean decision rule. Recent works demonstrated that deep nets trained with mean squared error (MSE) loss perform comparably to those trained with CE. As a preliminary, we empirically establish that NC emerges in such MSE-trained deep nets as well through experiments on three canonical networks and five benchmark datasets. We provide, in a Google Colab notebook, PyTorch code for reproducing MSE-NC and CE-NC: https://colab.research.google.com/github/neuralcollapse/neuralcollapse/blob/main/neuralcollapse.ipynb. The analytically-tractable MSE loss offers more mathematical opportunities than the hard-to-analyze CE loss, inspiring us to leverage MSE loss towards the theoretical investigation of NC. We develop three main contributions: (I) We show a new decomposition of the MSE loss into (A) terms directly interpretable through the lens of NC and which assume the last-layer classifier is exactly the least-squares classifier; and (B) a term capturing the deviation from this least-squares classifier. (II) We exhibit experiments on canonical datasets and networks demonstrating that term-(B) is negligible during training. …
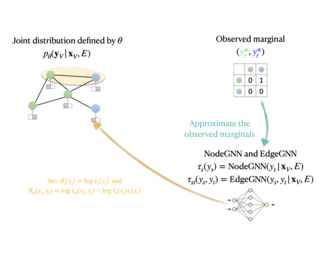
This paper studies node classification in the inductive setting, i.e., aiming to learn a model on labeled training graphs and generalize it to infer node labels on unlabeled test graphs. This problem has been extensively studied with graph neural networks (GNNs) by learning effective node representations, as well as traditional structured prediction methods for modeling the structured output of node labels, e.g., conditional random fields (CRFs). In this paper, we present a new approach called the Structured Proxy Network (SPN), which combines the advantages of both worlds. SPN defines flexible potential functions of CRFs with GNNs. However, learning such a model is nontrivial as it involves optimizing a maximin game with high-cost inference. Inspired by the underlying connection between joint and marginal distributions defined by Markov networks, we propose to solve an approximate version of the optimization problem as a proxy, which yields a near-optimal solution, making learning more efficient. Extensive experiments on two settings show that our approach outperforms many competitive baselines.
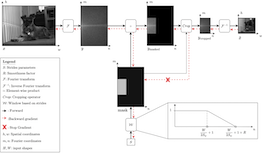
Convolutional neural networks typically contain several downsampling operators, such as strided convolutions or pooling layers, that progressively reduce the resolution of intermediate representations. This provides some shift-invariance while reducing the computational complexity of the whole architecture. A critical hyperparameter of such layers is their stride: the integer factor of downsampling. As strides are not differentiable, finding the best configuration either requires cross-validation or discrete optimization (e.g. architecture search), which rapidly become prohibitive as the search space grows exponentially with the number of downsampling layers. Hence, exploring this search space by gradient descent would allow finding better configurations at a lower computational cost. This work introduces DiffStride, the first downsampling layer with learnable strides. Our layer learns the size of a cropping mask in the Fourier domain, that effectively performs resizing in a differentiable way. Experiments on audio and image classification show the generality and effectiveness of our solution: we use DiffStride as a drop-in replacement to standard downsampling layers and outperform them. In particular, we show that introducing our layer into a ResNet-18 architecture allows keeping consistent high performance on CIFAR10, CIFAR100 and ImageNet even when training starts from poor random stride configurations. Moreover, formulating strides as learnable variables allows …
We prove that finding all globally optimal two-layer ReLU neural networks can be performed by solving a convex optimization program with cone constraints. Our analysis is novel, characterizes all optimal solutions, and does not leverage duality-based analysis which was recently used to lift neural network training into convex spaces. Given the set of solutions of our convex optimization program, we show how to construct exactly the entire set of optimal neural networks. We provide a detailed characterization of this optimal set and its invariant transformations. As additional consequences of our convex perspective, (i) we establish that Clarke stationary points found by stochastic gradient descent correspond to the global optimum of a subsampled convex problem (ii) we provide a polynomial-time algorithm for checking if a neural network is a global minimum of the training loss (iii) we provide an explicit construction of a continuous path between any neural network and the global minimum of its sublevel set and (iv) characterize the minimal size of the hidden layer so that the neural network optimization landscape has no spurious valleys.Overall, we provide a rich framework for studying the landscape of neural network training loss through convexity.
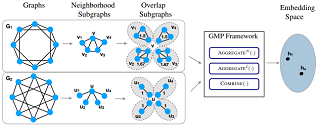
We propose a new perspective on designing powerful Graph Neural Networks (GNNs). In a nutshell, this enables a general solution to inject structural properties of graphs into a message-passing aggregation scheme of GNNs. As a theoretical basis, we develop a new hierarchy of local isomorphism on neighborhood subgraphs. Then, we theoretically characterize how message-passing GNNs can be designed to be more expressive than the Weisfeiler Lehman test. To elaborate this characterization, we propose a novel neural model, called GraphSNN, and prove that this model is strictly more expressive than the Weisfeiler Lehman test in distinguishing graph structures. We empirically verify the strength of our model on different graph learning tasks. It is shown that our model consistently improves the state-of-the-art methods on the benchmark tasks without sacrificing computational simplicity and efficiency.
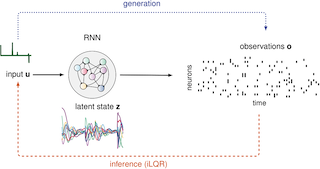
Understanding how neural dynamics give rise to behaviour is one of the most fundamental questions in systems neuroscience. To achieve this, a common approach is to record neural populations in behaving animals, and model these data as emanating from a latent dynamical system whose state trajectories can then be related back to behavioural observations via some form of decoding. As recordings are typically performed in localized circuits that form only a part of the wider implicated network, it is important to simultaneously learn the local dynamics and infer any unobserved external input that might drive them. Here, we introduce iLQR-VAE, a novel control-based approach to variational inference in nonlinear dynamical systems, capable of learning both latent dynamics, initial conditions, and ongoing external inputs. As in recent deep learning approaches, our method is based on an input-driven sequential variational autoencoder (VAE). The main novelty lies in the use of the powerful iterative linear quadratic regulator algorithm (iLQR) in the recognition model. Optimization of the standard evidence lower-bound requires differentiating through iLQR solutions, which is made possible by recent advances in differentiable control. Importantly, having the recognition model be implicitly defined by the generative model greatly reduces the number of free parameters …
In distributed learning, local SGD (also known as federated averaging) and its simple baseline minibatch SGD are widely studied optimization methods. Most existing analyses of these methods assume independent and unbiased gradient estimates obtained via with-replacement sampling. In contrast, we study shuffling-based variants: minibatch and local Random Reshuffling, which draw stochastic gradients without replacement and are thus closer to practice. For smooth functions satisfying the Polyak-Łojasiewicz condition, we obtain convergence bounds (in the large epoch regime) which show that these shuffling-based variants converge faster than their with-replacement counterparts. Moreover, we prove matching lower bounds showing that our convergence analysis is tight. Finally, we propose an algorithmic modification called synchronized shuffling that leads to convergence rates faster than our lower bounds in near-homogeneous settings.

Tensor computations underlie modern scientific computing and deep learning.A number of tensor frameworks emerged varying in execution model, hardware support, memory management, model definition, etc.However, tensor operations in all frameworks follow the same paradigm.Recent neural network architectures demonstrate demand for higher expressiveness of tensor operations.The current paradigm is not suited to write readable, reliable, or easy-to-modify code for multidimensional tensor manipulations. Moreover, some commonly used operations do not provide sufficient checks and can break a tensor structure.These mistakes are elusive as no tools or tests can detect them.Independently, API discrepancies complicate code transfer between frameworks.We propose einops notation: a uniform and generic way to manipulate tensor structure, that significantly improves code readability and flexibility by focusing on the structure of input and output tensors.We implement einops notation in a Python package that efficiently supports multiple widely used frameworks and provides framework-independent minimalist API for tensor manipulations.
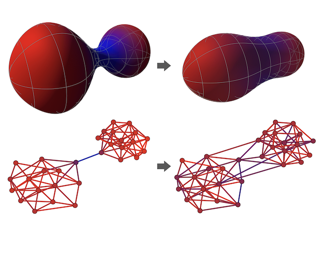
In this paper, we perform an in-depth study of the properties and applications of aligned generative models.We refer to two models as aligned if they share the same architecture, and one of them (the child) is obtained from the other (the parent) via fine-tuning to another domain, a common practice in transfer learning. Several works already utilize some basic properties of aligned StyleGAN models to perform image-to-image translation. Here, we perform the first detailed exploration of model alignment, also focusing on StyleGAN. First, we empirically analyze aligned models and provide answers to important questions regarding their nature. In particular, we find that the child model's latent spaces are semantically aligned with those of the parent, inheriting incredibly rich semantics, even for distant data domains such as human faces and churches. Second, equipped with this better understanding, we leverage aligned models to solve a diverse set of tasks. In addition to image translation, we demonstrate fully automatic cross-domain image morphing. We further show that zero-shot vision tasks may be performed in the child domain, while relying exclusively on supervision in the parent domain. We demonstrate qualitatively and quantitatively that our approach yields state-of-the-art results, while requiring only simple fine-tuning and inversion.
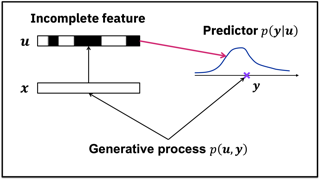
We are concerned with the problem of distributional prediction with incomplete features: The goal is to estimate the distribution of target variables given feature vectors with some of the elements missing. A typical approach to this problem is to perform missing-value imputation and regression, simultaneously or sequentially, which we call the generative approach. Another approach is to perform regression after appropriately encoding missing values into the feature, which we call the discriminative approach. In comparison, the generative approach is more robust to the feature corruption while the discriminative approach is more favorable to maximize the performance of prediction. In this study, we propose a hybrid method to take the best of both worlds. Our method utilizes the black-box variational inference framework so that it can be applied to a wide variety of modern machine learning models, including the variational autoencoders. We also confirmed the effectiveness of the proposed method empirically.
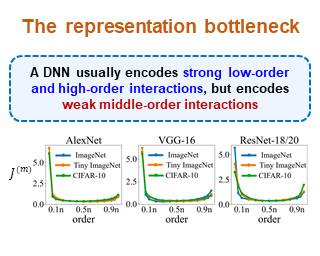
This paper explores the bottleneck of feature representations of deep neural networks (DNNs), from the perspective of the complexity of interactions between input variables encoded in DNNs. To this end, we focus on the multi-order interaction between input variables, where the order represents the complexity of interactions. We discover that a DNN is more likely to encode both too simple and too complex interactions, but usually fails to learn interactions of intermediate complexity. Such a phenomenon is widely shared by different DNNs for different tasks. This phenomenon indicates a cognition gap between DNNs and humans, and we call it a representation bottleneck. We theoretically prove the underlying reason for the representation bottleneck. Furthermore, we propose losses to encourage/penalize the learning of interactions of specific complexities, and analyze the representation capacities of interactions of different complexities. The code is available at https://github.com/Nebularaid2000/bottleneck.

Continual learning (CL) aims to learn a sequence of tasks without forgetting the previously acquired knowledge. However, recent CL advances are restricted to supervised continual learning (SCL) scenarios. Consequently, they are not scalable to real-world applications where the data distribution is often biased and unannotated. In this work, we focus on unsupervised continual learning (UCL), where we learn the feature representations on an unlabelled sequence of tasks and show that reliance on annotated data is not necessary for continual learning. We conduct a systematic study analyzing the learned feature representations and show that unsupervised visual representations are surprisingly more robust to catastrophic forgetting, consistently achieve better performance, and generalize better to out-of-distribution tasks than SCL. Furthermore, we find that UCL achieves a smoother loss landscape through qualitative analysis of the learned representations and learns meaningful feature representations. Additionally, we propose Lifelong Unsupervised Mixup (Lump), a simple yet effective technique that interpolates between the current task and previous tasks' instances to alleviate catastrophic forgetting for unsupervised representations.
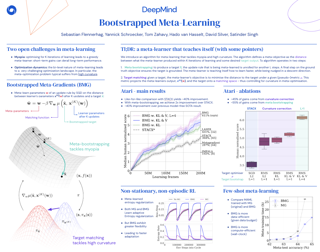
Meta-learning empowers artificial intelligence to increase its efficiency by learning how to learn. Unlocking this potential involves overcoming a challenging meta-optimisation problem. We propose an algorithm that tackles this problem by letting the meta-learner teach itself. The algorithm first bootstraps a target from the meta-learner, then optimises the meta-learner by minimising the distance to that target under a chosen (pseudo-)metric. Focusing on meta-learning with gradients, we establish conditions that guarantee performance improvements and show that metric can be used to control meta-optimisation. Meanwhile, the bootstrapping mechanism can extend the effective meta-learning horizon without requiring backpropagation through all updates. We achieve a new state-of-the art for model-free agents on the Atari ALE benchmark and demonstrate that it yields both performance and efficiency gains in multi-task meta-learning. Finally, we explore how bootstrapping opens up new possibilities and find that it can meta-learn efficient exploration in an epsilon-greedy Q-learning agent - without backpropagating through the update rule.
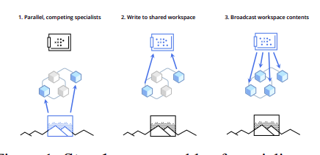
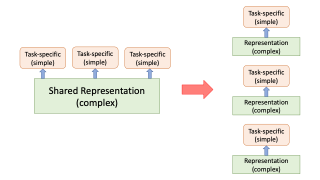
Deep learning has seen a movement away from representing examples with a monolithic hidden state towards a richly structured state. For example, Transformers segment by position, and object-centric architectures decompose images into entities. In all these architectures, interactions between different elements are modeled via pairwise interactions: Transformers make use of self-attention to incorporate information from other positions and object-centric architectures make use of graph neural networks to model interactions among entities. We consider how to improve on pairwise interactions in terms of global coordination and a coherent, integrated representation that can be used for downstream tasks. In cognitive science, a global workspace architecture has been proposed in which functionally specialized components share information through a common, bandwidth-limited communication channel. We explore the use of such a communication channel in the context of deep learning for modeling the structure of complex environments. The proposed method includes a shared workspace through which communication among different specialist modules takes place but due to limits on the communication bandwidth, specialist modules must compete for access. We show that capacity limitations have a rational basis in that (1) they encourage specialization and compositionality and (2) they facilitate the synchronization of otherwise independent specialists.
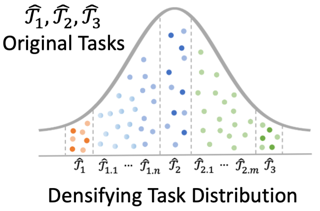
Meta-learning enables algorithms to quickly learn a newly encountered task with just a few labeled examples by transferring previously learned knowledge. However, the bottleneck of current meta-learning algorithms is the requirement of a large number of meta-training tasks, which may not be accessible in real-world scenarios. To address the challenge that available tasks may not densely sample the space of tasks, we propose to augment the task set through interpolation. By meta-learning with task interpolation (MLTI), our approach effectively generates additional tasks by randomly sampling a pair of tasks and interpolating the corresponding features and labels. Under both gradient-based and metric-based meta-learning settings, our theoretical analysis shows MLTI corresponds to a data-adaptive meta-regularization and further improves the generalization. Empirically, in our experiments on eight datasets from diverse domains including image recognition, pose prediction, molecule property prediction, and medical image classification, we find that the proposed general MLTI framework is compatible with representative meta-learning algorithms and consistently outperforms other state-of-the-art strategies.
Robustness to distribution shifts is critical for deploying machine learning models in the real world. Despite this necessity, there has been little work in defining the underlying mechanisms that cause these shifts and evaluating the robustness of algorithms across multiple, different distribution shifts. To this end, we introduce a framework that enables fine-grained analysis of various distribution shifts. We provide a holistic analysis of current state-of-the-art methods by evaluating 19 distinct methods grouped into five categories across both synthetic and real-world datasets. Overall, we train more than 85K models. Our experimental framework can be easily extended to include new methods, shifts, and datasets. We find, unlike previous work (Gulrajani & Lopez-Paz, 2021), that progress has been made over a standard ERM baseline; in particular, pretraining and augmentations (learned or heuristic) offer large gains in many cases. However, the best methods are not consistent over different datasets and shifts. We will open source our experimental framework, allowing future work to evaluate new methods over multiple shifts to obtain a more complete picture of a method's effectiveness. Code is available at github.com/deepmind/distributionshiftframework.
In this paper, we introduce Target-Aware Weighted Training (TAWT), a weighted training algorithm for cross-task learning based on minimizing a representation-based task distance between the source and target tasks. We show that TAWT is easy to implement, is computationally efficient, requires little hyperparameter tuning, and enjoys non-asymptotic learning-theoretic guarantees. The effectiveness of TAWT is corroborated through extensive experiments with BERT on four sequence tagging tasks in natural language processing (NLP), including part-of-speech (PoS) tagging, chunking, predicate detection, and named entity recognition (NER). As a byproduct, the proposed representation-based task distance allows one to reason in a theoretically principled way about several critical aspects of cross-task learning, such as the choice of the source data and the impact of fine-tuning.
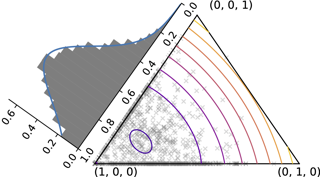
Neural networks and other machine learning models compute continuous representations, while humans communicate mostly through discrete symbols. Reconciling these two forms of communication is desirable for generating human-readable interpretations or learning discrete latent variable models, while maintaining end-to-end differentiability. Some existing approaches (such as the Gumbel-Softmax transformation) build continuous relaxations that are discrete approximations in the zero-temperature limit, while others (such as sparsemax transformations and the Hard Concrete distribution) produce discrete/continuous hybrids. In this paper, we build rigorous theoretical foundations for these hybrids, which we call "mixed random variables.'' Our starting point is a new "direct sum'' base measure defined on the face lattice of the probability simplex. From this measure, we introduce new entropy and Kullback-Leibler divergence functions that subsume the discrete and differential cases and have interpretations in terms of code optimality. Our framework suggests two strategies for representing and sampling mixed random variables, an extrinsic ("sample-and-project'’) and an intrinsic one (based on face stratification). We experiment with both approaches on an emergent communication benchmark and on modeling MNIST and Fashion-MNIST data with variational auto-encoders with mixed latent variables.
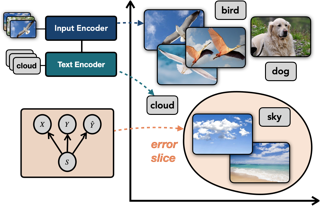
Machine learning models that achieve high overall accuracy often make systematic errors on important subsets (or slices) of data. Identifying underperforming slices is particularly challenging when working with high-dimensional inputs (e.g. images, audio), where important slices are often unlabeled. In order to address this issue, recent studies have proposed automated slice discovery methods (SDMs), which leverage learned model representations to mine input data for slices on which a model performs poorly. To be useful to a practitioner, these methods must identify slices that are both underperforming and coherent (i.e. united by a human-understandable concept). However, no quantitative evaluation framework currently exists for rigorously assessing SDMs with respect to these criteria. Additionally, prior qualitative evaluations have shown that SDMs often identify slices that are incoherent. In this work, we address these challenges by first designing a principled evaluation framework that enables a quantitative comparison of SDMs across 1,235 slice discovery settings in three input domains (natural images, medical images, and time-series data).Then, motivated by the recent development of powerful cross-modal representation learning approaches, we present Domino, an SDM that leverages cross-modal embeddings and a novel error-aware mixture model to discover and describe coherent slices. We find that Domino accurately identifies 36% …
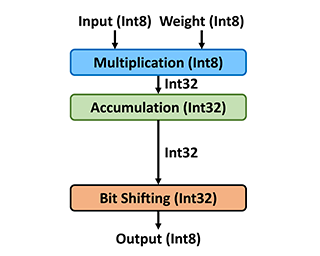
Neural network quantization is a promising compression technique to reduce memory footprint and save energy consumption, potentially leading to real-time inference. However, there is a performance gap between quantized and full-precision models. To reduce it, existing quantization approaches require high-precision INT32 or full-precision multiplication during inference for scaling or dequantization. This introduces a noticeable cost in terms of memory, speed, and required energy. To tackle these issues, we present F8Net, a novel quantization framework consisting in only fixed-point 8-bit multiplication. To derive our method, we first discuss the advantages of fixed-point multiplication with different formats of fixed-point numbers and study the statistical behavior of the associated fixed-point numbers. Second, based on the statistical and algorithmic analysis, we apply different fixed-point formats for weights and activations of different layers. We introduce a novel algorithm to automatically determine the right format for each layer during training. Third, we analyze a previous quantization algorithm—parameterized clipping activation (PACT)—and reformulate it using fixed-point arithmetic. Finally, we unify the recently proposed method for quantization fine-tuning and our fixed-point approach to show the potential of our method. We verify F8Net on ImageNet for MobileNet V1/V2 and ResNet18/50. Our approach achieves comparable and better performance, when compared not …
Machine learning systems deployed in the wild are often trained on a source distribution but deployed on a different target distribution. Unlabeled data can be a powerful point of leverage for mitigating these distribution shifts, as it is frequently much more available than labeled data and can often be obtained from distributions beyond the source distribution as well. However, existing distribution shift benchmarks with unlabeled data do not reflect the breadth of scenarios that arise in real-world applications. In this work, we present the WILDS 2.0 update, which extends 8 of the 10 datasets in the WILDS benchmark of distribution shifts to include curated unlabeled data that would be realistically obtainable in deployment. These datasets span a wide range of applications (from histology to wildlife conservation), tasks (classification, regression, and detection), and modalities (photos, satellite images, microscope slides, text, molecular graphs). The update maintains consistency with the original WILDS benchmark by using identical labeled training, validation, and test sets, as well as identical evaluation metrics. We systematically benchmark state-of-the-art methods that use unlabeled data, including domain-invariant, self-training, and self-supervised methods, and show that their success on WILDS is limited. To facilitate method development, we provide an open-source package that automates …
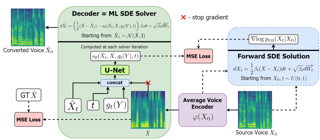
Voice conversion is a common speech synthesis task which can be solved in different ways depending on a particular real-world scenario. The most challenging one often referred to as one-shot many-to-many voice conversion consists in copying target voice from only one reference utterance in the most general case when both source and target speakers do not belong to the training dataset. We present a scalable high-quality solution based on diffusion probabilistic modeling and demonstrate its superior quality compared to state-of-the-art one-shot voice conversion approaches. Moreover, focusing on real-time applications, we investigate general principles which can make diffusion models faster while keeping synthesis quality at a high level. As a result, we develop a novel Stochastic Differential Equations solver suitable for various diffusion model types and generative tasks as shown through empirical studies and justify it by theoretical analysis.
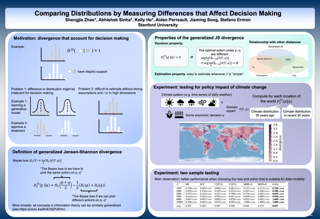
Measuring the discrepancy between two probability distributions is a fundamental problem in machine learning and statistics. We propose a new class of discrepancies based on the optimal loss for a decision task -- two distributions are different if the optimal decision loss is higher on their mixture than on each individual distribution. By suitably choosing the decision task, this generalizes the Jensen-Shannon divergence and the maximum mean discrepancy family. We apply our approach to two-sample tests, and on various benchmarks, we achieve superior test power compared to competing methods. In addition, a modeler can directly specify their preferences when comparing distributions through the decision loss. We apply this property to understanding the effects of climate change on different social and economic activities, evaluating sample quality, and selecting features targeting different decision tasks.
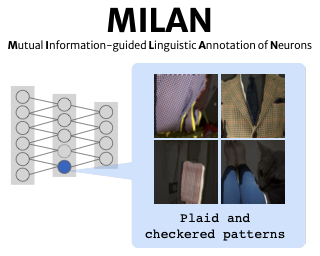
Some neurons in deep networks specialize in recognizing highly specific perceptual, structural, or semantic features of inputs. In computer vision, techniques exist for identifying neurons that respond to individual concept categories like colors, textures, and object classes. But these techniques are limited in scope, labeling only a small subset of neurons and behaviors in any network. Is a richer characterization of neuron-level computation possible? We introduce a procedure (called MILAN, for mutual information-guided linguistic annotation of neurons) that automatically labels neurons with open-ended, compositional, natural language descriptions. Given a neuron, MILAN generates a description by searching for a natural language string that maximizes pointwise mutual information with the image regions in which the neuron is active. MILAN produces fine-grained descriptions that capture categorical, relational, and logical structure in learned features. These descriptions obtain high agreement with human-generated feature descriptions across a diverse set of model architectures and tasks, and can aid in understanding and controlling learned models. We highlight three applications of natural language neuron descriptions. First, we use MILAN for analysis, characterizing the distribution and importance of neurons selective for attribute, category, and relational information in vision models. Second, we use MILAN for auditing, surfacing neurons sensitive to human …

This paper explores a simple method for improving the zero-shot learning abilities of language models. We show that instruction tuning—finetuning language models on a collection of datasets described via instructions—substantially improves zero-shot performance on unseen tasks. We take a 137B parameter pretrained language model and instruction tune it on over 60 NLP datasets verbalized via natural language instruction templates. We evaluate this instruction-tuned model, which we call FLAN, on unseen task types. FLAN substantially improves the performance of its unmodified counterpart and surpasses zero-shot 175B GPT-3 on 20 of 25 datasets that we evaluate. FLAN even outperforms few-shot GPT-3 by a large margin on ANLI, RTE, BoolQ, AI2-ARC, OpenbookQA, and StoryCloze. Ablation studies reveal that number of finetuning datasets, model scale, and natural language instructions are key to the success of instruction tuning.
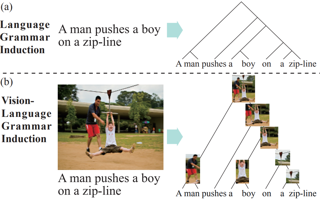
We introduce a new task, unsupervised vision-language (VL) grammar induction. Given an image-caption pair, the goal is to extract a shared hierarchical structure for both image and language simultaneously. We argue that such structured output, grounded in both modalities, is a clear step towards the high-level understanding of multimodal information. Besides challenges existing in conventional visually grounded grammar induction tasks, VL grammar induction requires a model to capture contextual semantics and perform a fine-grained alignment. To address these challenges, we propose a novel method, CLIORA, which constructs a shared vision-language constituency tree structure with context-dependent semantics for all possible phrases in different levels of the tree. It computes a matching score between each constituent and image region, trained via contrastive learning. It integrates two levels of fusion, namely at feature-level and at score-level, so as to allow fine-grained alignment. We introduce a new evaluation metric for VL grammar induction, CCRA, and show a 3.3% improvement over a strong baseline on Flickr30k Entities. We also evaluate our model via two derived tasks, i.e., language grammar induction and phrase grounding, and improve over the state-of-the-art for both.
Differentially Private (DP) learning has seen limited success for building large deep learning models of text, and straightforward attempts at applying Differentially Private Stochastic Gradient Descent (DP-SGD) to NLP tasks have resulted in large performance drops and high computational overhead.We show that this performance drop can be mitigated with (1) the use of large pretrained language models; (2) non-standard hyperparameters that suit DP optimization; and (3) fine-tuning objectives which are aligned with the pretraining procedure.With the above, we obtain NLP models that outperform state-of-the-art DP-trained models under the same privacy budget and strong non-private baselines---by directly fine-tuning pretrained models with DP optimization on moderately-sized corpora. To address the computational challenge of running DP-SGD with large Transformers, we propose a memory saving technique that allows clipping in DP-SGD to run without instantiating per-example gradients for any linear layer in the model. The technique enables privately training Transformers with almost the same memory cost as non-private training at a modest run-time overhead. Contrary to conventional wisdom that DP optimization fails at learning high-dimensional models (due to noise that scales with dimension) empirical results reveal that private learning with pretrained language models tends to not suffer from dimension-dependent performance degradation.Code to reproduce results …
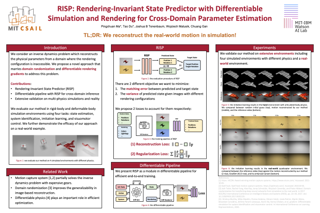
This work considers identifying parameters characterizing a physical system's dynamic motion directly from a video whose rendering configurations are inaccessible. Existing solutions require massive training data or lack generalizability to unknown rendering configurations. We propose a novel approach that marries domain randomization and differentiable rendering gradients to address this problem. Our core idea is to train a rendering-invariant state-prediction (RISP) network that transforms image differences into state differences independent of rendering configurations, e.g., lighting, shadows, or material reflectance. To train this predictor, we formulate a new loss on rendering variances using gradients from differentiable rendering. Moreover, we present an efficient, second-order method to compute the gradients of this loss, allowing it to be integrated seamlessly into modern deep learning frameworks. We evaluate our method in rigid-body and deformable-body simulation environments using four tasks: state estimation, system identification, imitation learning, and visuomotor control. We further demonstrate the efficacy of our approach on a real-world example: inferring the state and action sequences of a quadrotor from a video of its motion sequences. Compared with existing methods, our approach achieves significantly lower reconstruction errors and has better generalizability among unknown rendering configurations.
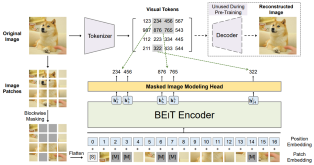
We introduce a self-supervised vision representation model BEiT, which stands for Bidirectional Encoder representation from Image Transformers. Following BERT developed in the natural language processing area, we propose a masked image modeling task to pretrain vision Transformers. Specifically, each image has two views in our pre-training, i.e., image patches (such as 16 x 16 pixels), and visual tokens (i.e., discrete tokens). We first ``tokenize'' the original image into visual tokens. Then we randomly mask some image patches and fed them into the backbone Transformer. The pre-training objective is to recover the original visual tokens based on the corrupted image patches. After pre-training BEiT, we directly fine-tune the model parameters on downstream tasks by appending task layers upon the pretrained encoder. Experimental results on image classification and semantic segmentation show that our model achieves competitive results with previous pre-training methods.
Predicting molecular conformations from molecular graphs is a fundamental problem in cheminformatics and drug discovery. Recently, significant progress has been achieved with machine learning approaches, especially with deep generative models. Inspired by the diffusion process in classical non-equilibrium thermodynamics where heated particles will diffuse from original states to a noise distribution, in this paper, we propose a novel generative model named GeoDiff for molecular conformation prediction. GeoDiff treats each atom as a particle and learns to directly reverse the diffusion process (i.e., transforming from a noise distribution to stable conformations) as a Markov chain. Modeling such a generation process is however very challenging as the likelihood of conformations should be roto-translational invariant. We theoretically show that Markov chains evolving with equivariant Markov kernels can induce an invariant distribution by design, and further propose building blocks for the Markov kernels to preserve the desirable equivariance property. The whole framework can be efficiently trained in an end-to-end fashion by optimizing a weighted variational lower bound to the (conditional) likelihood. Experiments on multiple benchmarks show that GeoDiff is superior or comparable to existing state-of-the-art approaches, especially on large molecules.
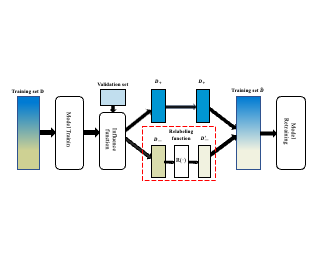
The performance of supervised learning methods easily suffers from the training bias issue caused by train-test distribution mismatch or label noise. Influence function is a technique that estimates the impacts of a training sample on the model’s predictions. Recent studies on \emph{data resampling} have employed influence functions to identify \emph{harmful} training samples that will degrade model's test performance. They have shown that discarding or downweighting the identified harmful training samples is an effective way to resolve training biases. In this work, we move one step forward and propose an influence-based relabeling framework named RDIA for reusing harmful training samples toward better model performance. To achieve this, we use influence functions to estimate how relabeling a training sample would affect model's test performance and further develop a novel relabeling function R. We theoretically prove that applying R to relabel harmful training samples allows the model to achieve lower test loss than simply discarding them for any classification tasks using cross-entropy loss. Extensive experiments on ten real-world datasets demonstrate RDIA outperforms the state-of-the-art data resampling methods and improves model's robustness against label noise.