An Analytical Solution to Gauss-Newton Loss for Direct Image Alignment
{kind=link}
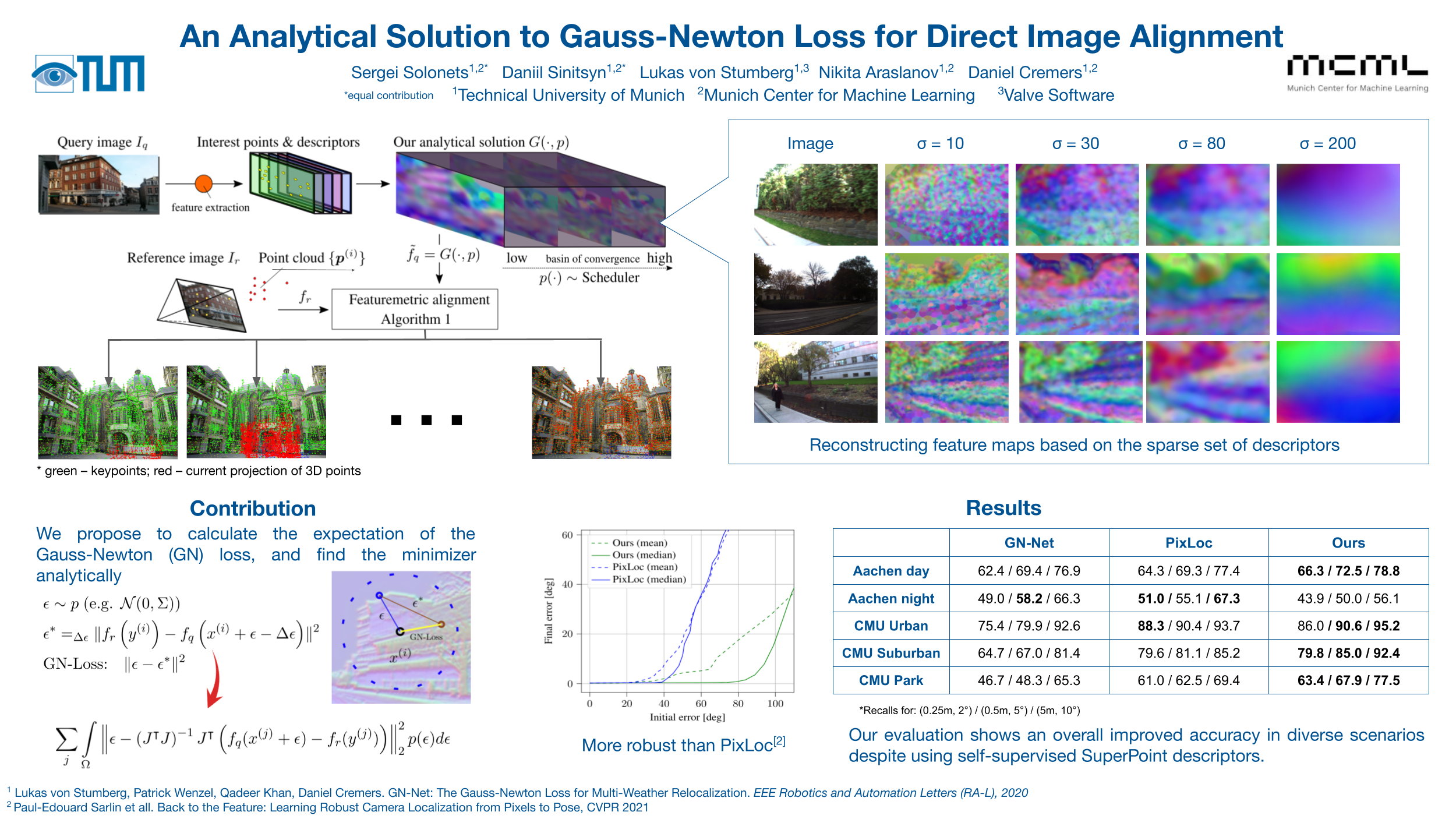
Abstract
Direct image alignment is a widely used technique for relative 6DoF pose estimation between two images, but its accuracy strongly depends on pose initialization.Therefore, recent end-to-end frameworks increase the convergence basin of the learned feature descriptors with special training objectives, such as the Gauss-Newton loss.However, the training data may exhibit bias toward a specific type of motion and pose initialization,thus limiting the generalization of these methods.In this work, we derive a closed-form solution to the expected optimum of the Gauss-Newton loss. The solution is agnostic to the underlying feature representation and allows us to dynamically adjust the basin of convergence according to our assumptions about the uncertainty in the current estimates. These properties allow for effective control over the convergence in the alignment process.Despite using self-supervised feature embeddings, our solution achieves compelling accuracy w.r.t. the state-of-the-art direct image alignment methods trained end-to-end with pose supervision, and demonstrates improved robustness to pose initialization.Our analytical solution exposes some inherent limitations of end-to-end learning with the Gauss-Newton loss, and establishes an intriguing connection between direct image alignment and feature-matching approaches.