On the Road with GPT-4V(ision): Explorations of Utilizing Visual-Language Model as Autonomous Driving Agent
{kind=link}
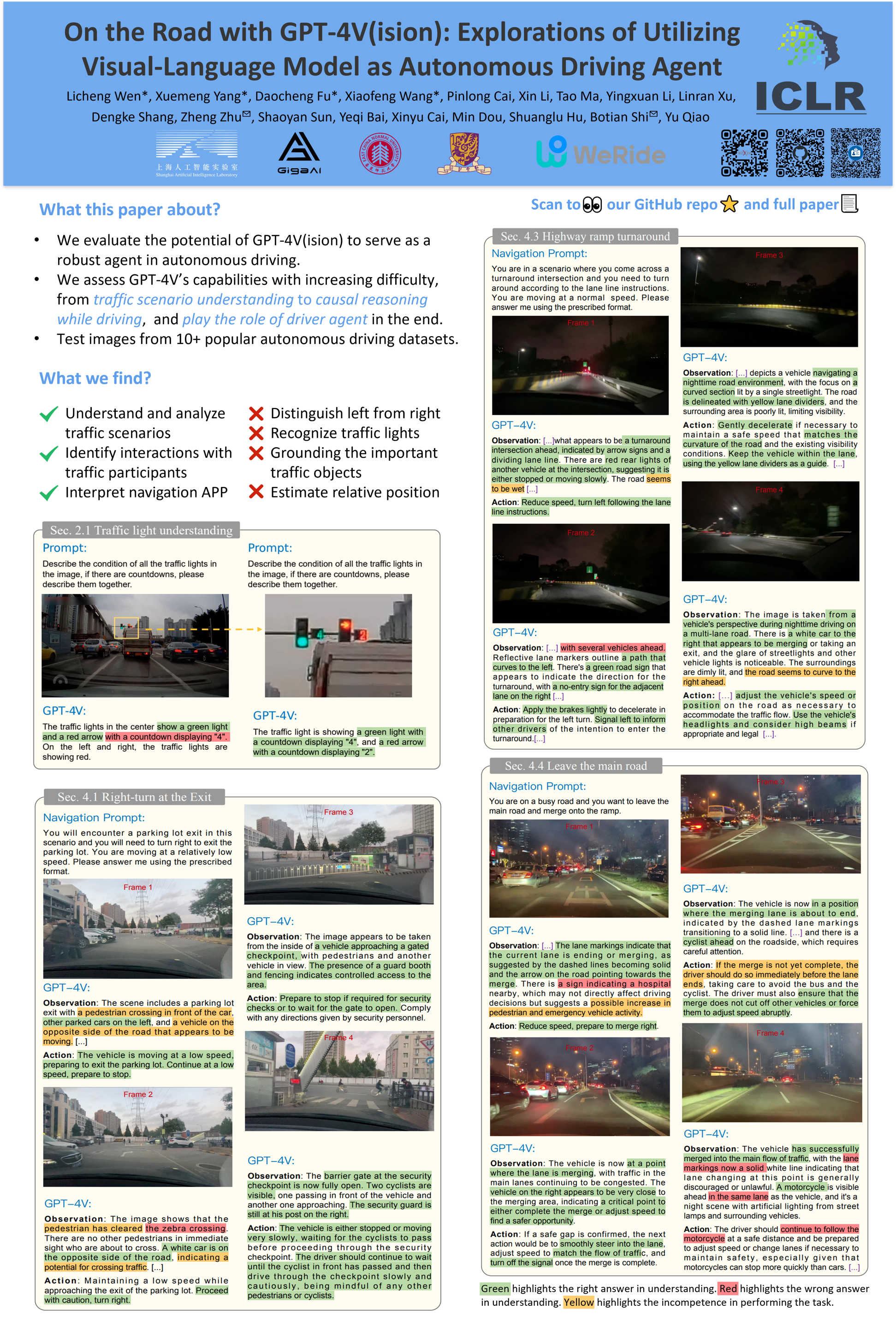
Abstract
The development of autonomous driving technology depends on merging perception, decision, and control systems. Traditional strategies have struggled to understand complex driving environments and other road users' intent. This bottleneck, especially in constructing common sense reasoning and nuanced scene understanding, affects the safe and reliable operations of autonomous vehicles. The introduction of Visual Language Models (VLM) opens up possibilities for fully autonomous driving. This report evaluates the potential of GPT-4V(ision), the latest state-of-the-art VLM, as an autonomous driving agent. The evaluation primarily assesses the model's ultimate ability to act as a driving agent under varying conditions, while also considering its capacity to understand driving scenes and make decisions.Findings show that GPT-4V outperforms existing systems in scene understanding and causal reasoning. It has the potential in handling unexpected scenarios, understanding intentions, and making informed decisions. However, limitations remain in direction determination, traffic light recognition, vision grounding, and spatial reasoning tasks, highlighting the need for further research.The project is now available on GitHub for interested parties to access and utilize: https://github.com/PJLab-ADG/GPT4V-AD-Exploration.