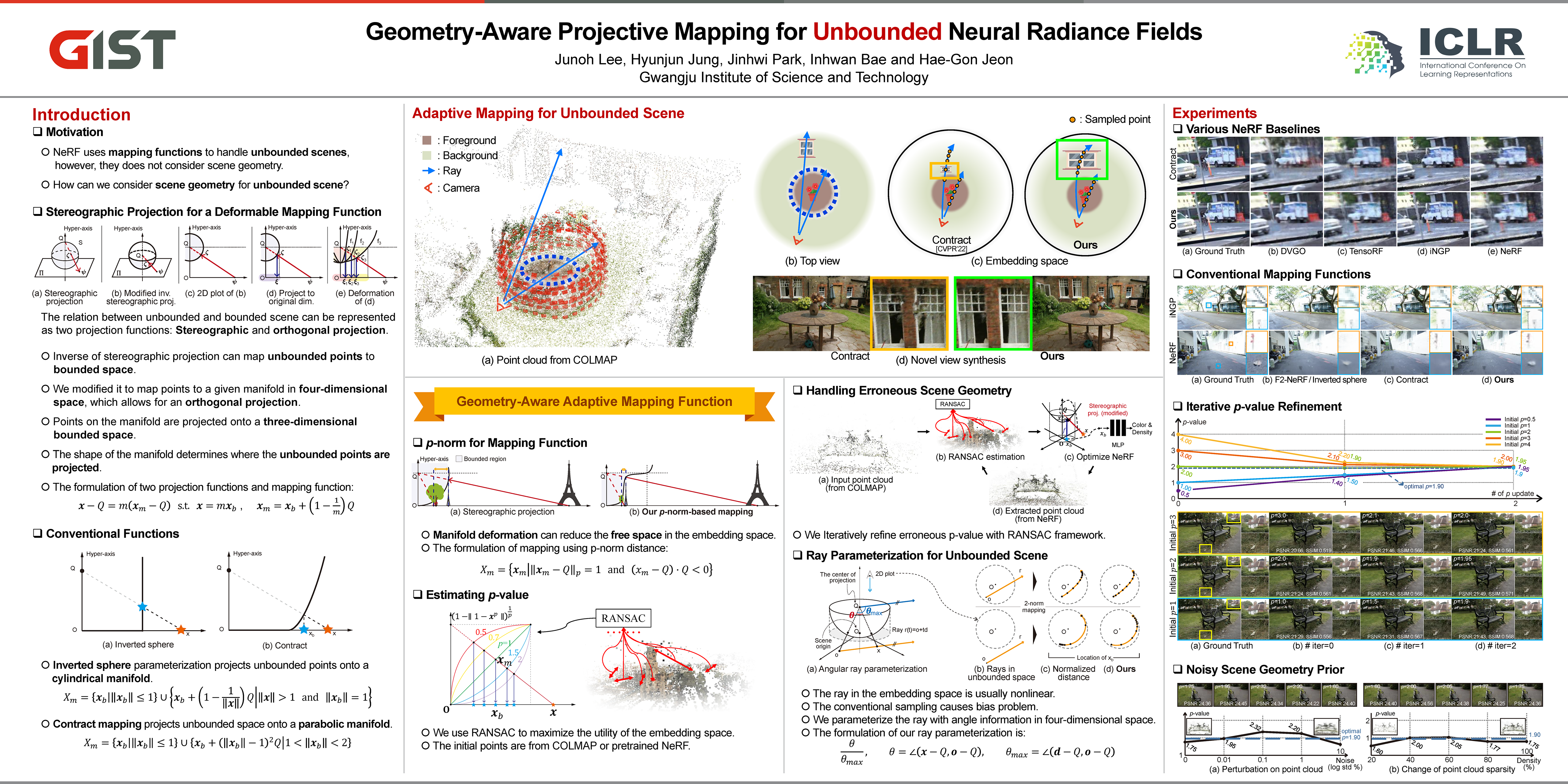
Geometry-Aware Projective Mapping for Unbounded Neural Radiance Fields
Junoh Lee ⋅ Hyunjun Jung ⋅ Jinhwi Park ⋅ Inhwan Bae ⋅ Hae-Gon Jeon
2024 Poster
{kind=link}
Abstract
Estimating neural radiance fields (NeRFs) is able to generate novel views of a scene from known imagery. Recent approaches have afforded dramatic progress on small bounded regions of the scene. For an unbounded scene where cameras point in any direction and contents exist at any distance, certain mapping functions are used to represent it within a bounded space, yet they either work in object-centric scenes or focus on objects close to the camera. The goal of this paper is to understand how to design a proper mapping function that considers per-scene optimization, which remains unexplored. We first present a geometric understanding of existing mapping functions that express the relation between the bounded and unbounded scenes. Here, we exploit a stereographic projection method to explain failures of the mapping functions, where input ray samples are too sparse to account for scene geometry in unbounded regions. To overcome the failures, we propose a novel mapping function based on a $p$-norm distance, allowing to adaptively sample the rays by adjusting the $p$-value according to scene geometry, even in unbounded regions. To take the advantage of our mapping function, we also introduce a new ray parameterization to properly allocate ray samples in the geometry of unbounded regions. Through the incorporation of both the novel mapping function and the ray parameterization within existing NeRF frameworks, our method achieves state-of-the-art novel view synthesis results on a variety of challenging datasets.
Video
Chat is not available.
Successful Page Load