GRAPH-CONSTRAINED DIFFUSION FOR END-TO-END PATH PLANNING
{kind=link}
Abstract
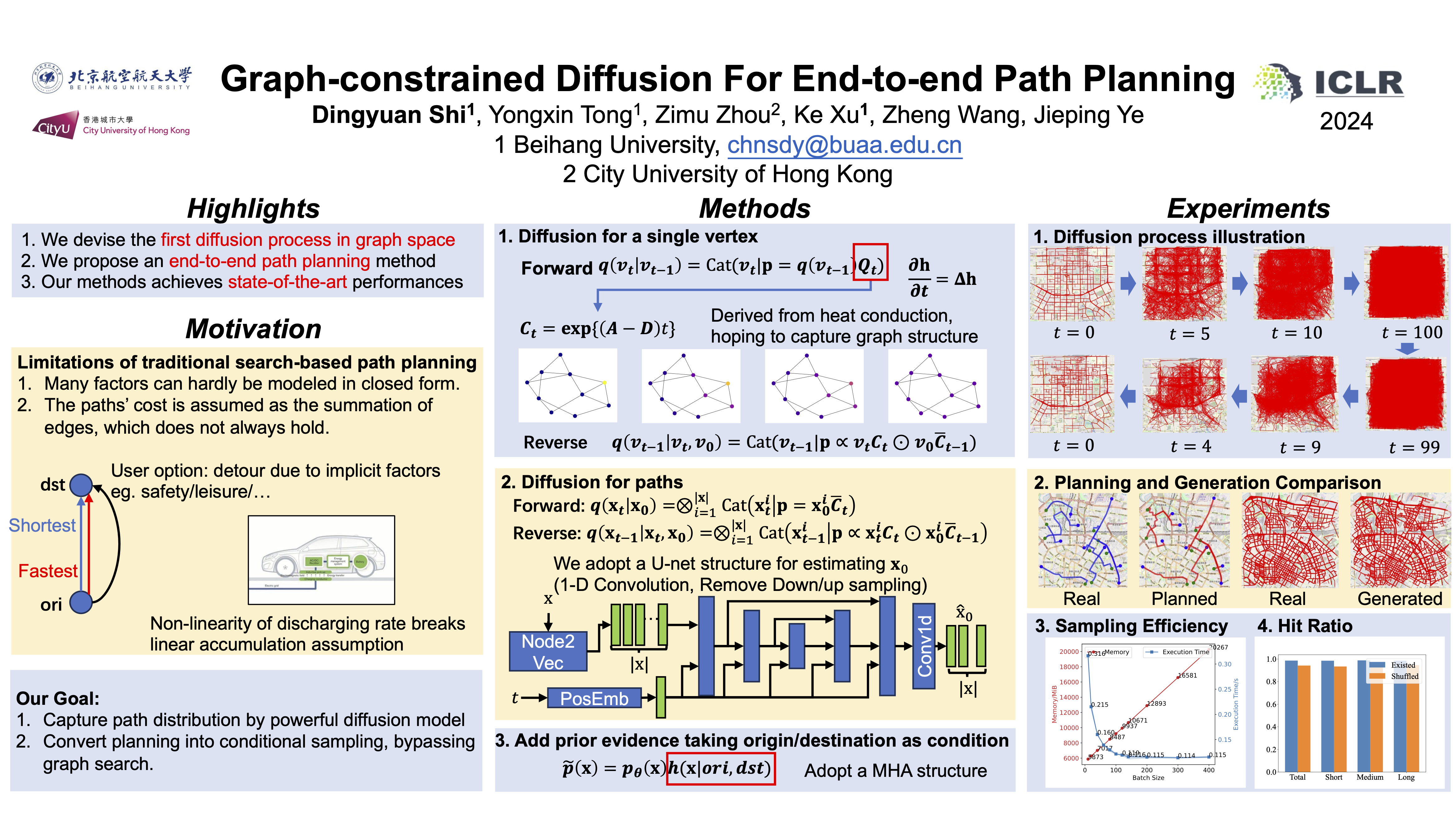
Path planning underpins various applications such as transportation, logistics, and robotics.Conventionally, path planning is formulated with explicit optimization objectives such as distance or time.However, real-world data reveals that user intentions are hard-to-model, suggesting a need for data-driven path planning that implicitly incorporates the complex user intentions.In this paper, we propose GDP, a diffusion-based model for end-to-end data-driven path planning.It effectively learns path patterns via a novel diffusion process that incorporates constraints from road networks, and plans paths as conditional path generation given the origin and destination as prior evidence.GDP is the first solution that bypasses the traditional search-based frameworks, a long-standing performance bottleneck in path planning.We validate the efficacy of GDP on two real-world datasets.Our GDP beats strong baselines by 14.2% ~ 43.5% and achieves state-of-the-art performances.