Learning invariant representations of time-homogeneous stochastic dynamical systems
{kind=link}
Abstract
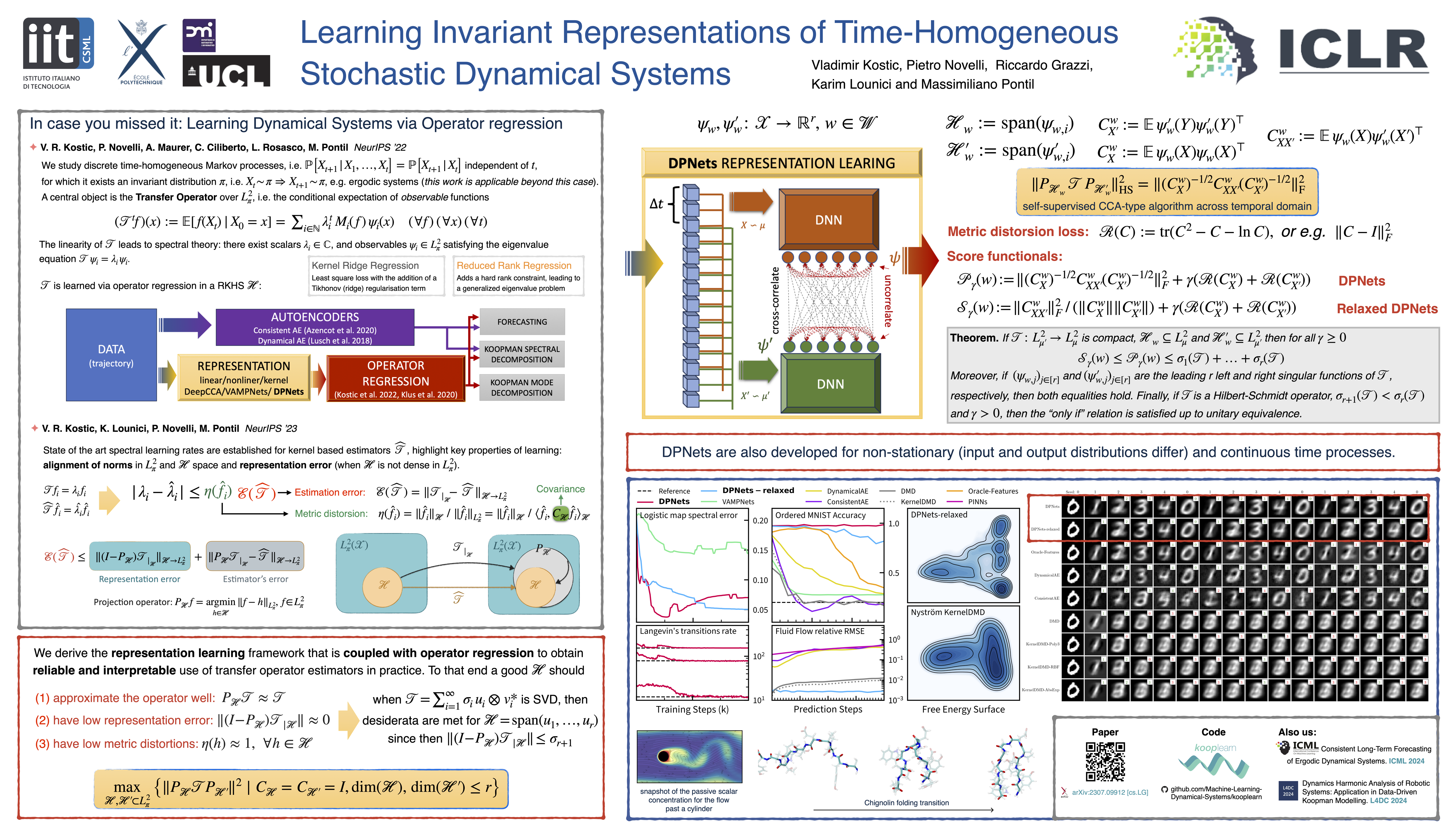
We consider the general class of time-homogeneous stochastic dynamical systems, both discrete and continuous, and study the problem of learning a representation of the state that faithfully captures its dynamics. This is instrumental to learning the transfer operator or the generator of the system, which in turn can be used for numerous tasks, such as forecasting and interpreting the system dynamics. We show that the search for a good representation can be cast as an optimization problem over neural networks. Our approach is supported by recent results in statistical learning theory, highlighting the role of approximation error and metric distortion in the learning problem. The objective function we propose is associated with projection operators from the representation space to the data space, overcomes metric distortion, and can be empirically estimated from data. In the discrete-time setting, we further derive a relaxed objective function that is differentiable and numerically well-conditioned. We compare our method against state-of-the-art approaches on different datasets, showing better performance across the board.