Uni-O4: Unifying Online and Offline Deep Reinforcement Learning with Multi-Step On-Policy Optimization
{kind=link}
Abstract
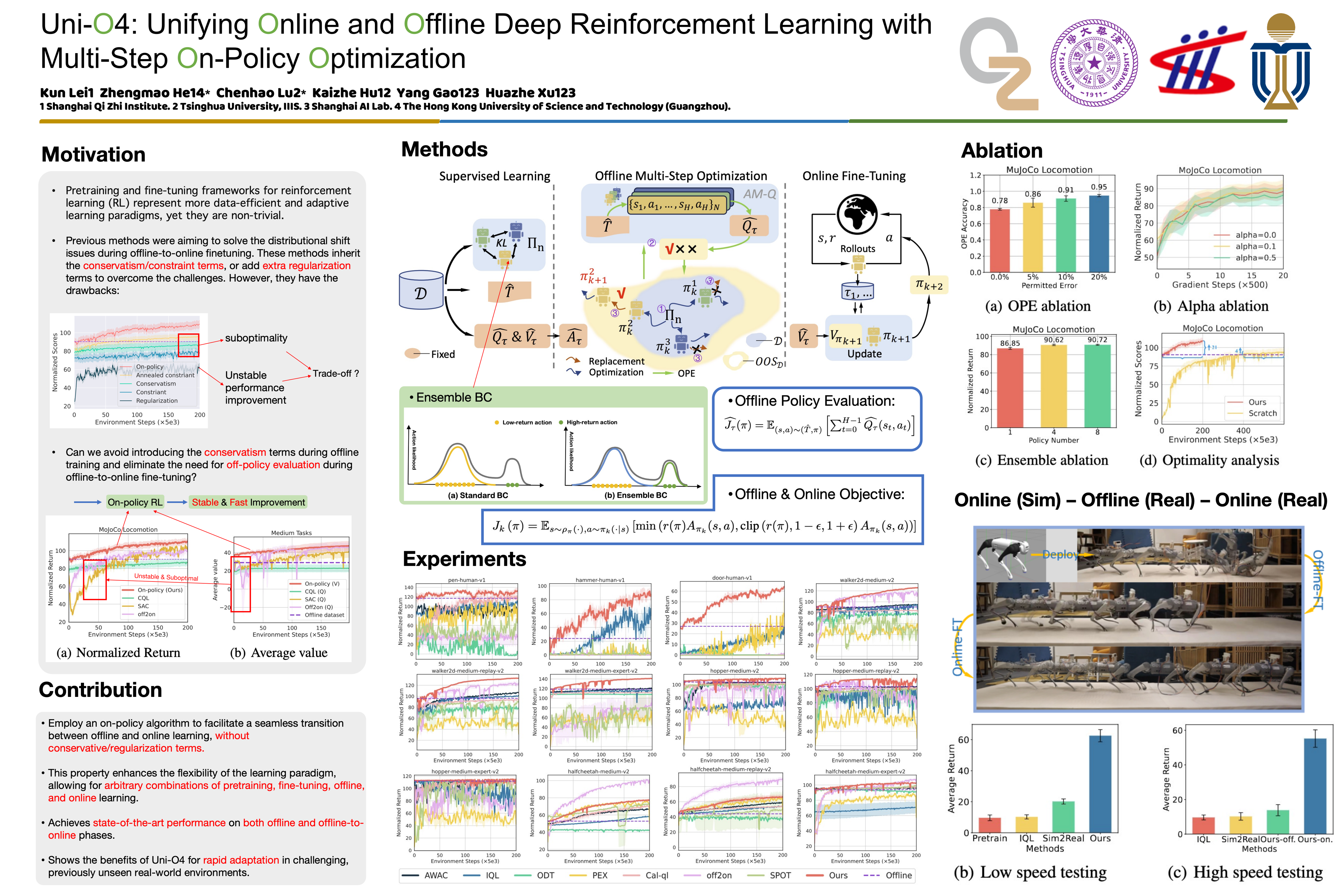
Combining offline and online reinforcement learning (RL) is crucial for efficient and safe learning. However, previous approaches treat offline and online learning as separate procedures, resulting in redundant designs and limited performance. We ask: Can we achieve straightforward yet effective offline and online learning without introducing extra conservatism or regularization? In this study, we propose Uni-O4, which utilizes an on-policy objective for both offline and online learning. Owning to the alignment of objectives in two phases, the RL agent can transfer between offline and online learning seamlessly. This property enhances the flexibility of the learning paradigm, allowing for arbitrary combinations of pretraining, fine-tuning, offline, and online learning. In the offline phase, specifically, Uni-O4 leverages diverse ensemble policies to address the mismatch issues between the estimated behavior policy and the offline dataset. Through a simple offline policy evaluation (OPE) approach, Uni-O4 can achieve multi-step policy improvement safely. We demonstrate that by employing the method above, the fusion of these two paradigms can yield superior offline initialization as well as stable and rapid online fine-tuning capabilities. Through real-world robot tasks, we highlight the benefits of this paradigm for rapid deployment in challenging, previously unseen real-world environments. Additionally, through comprehensive evaluations using numerous simulated benchmarks, we substantiate that our method achieves state-of-the-art performance in both offline and offline-to-online fine-tuning learning. Our website