Leveraging Hyperbolic Embeddings for Coarse-to-Fine Robot Design
{kind=link}
Abstract
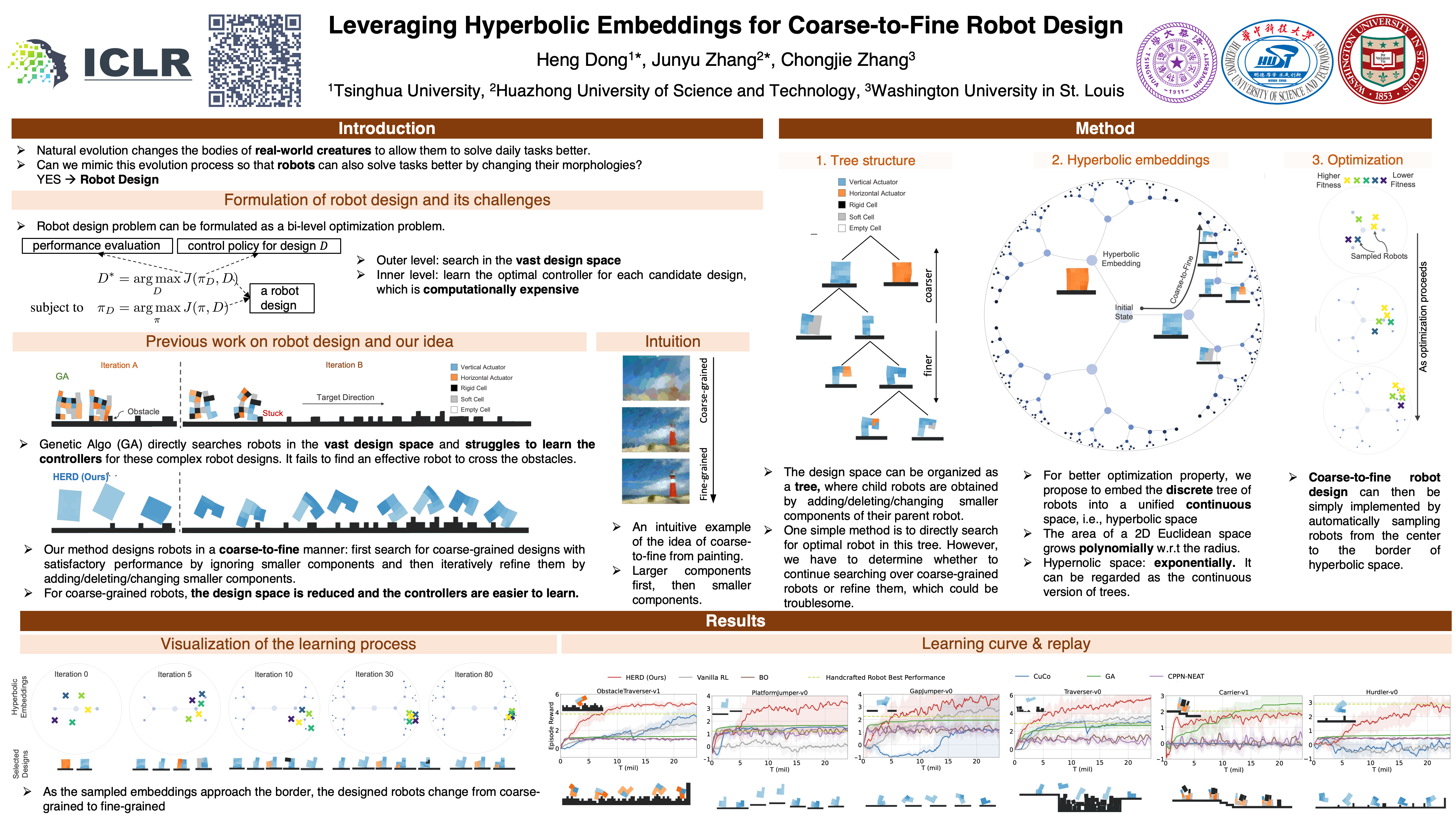
Multi-cellular robot design aims to create robots comprised of numerous cells that can be efficiently controlled to perform diverse tasks. Previous research has demonstrated the ability to generate robots for various tasks, but these approaches often optimize robots directly in the vast design space, resulting in robots with complicated morphologies that are hard to control. In response, this paper presents a novel coarse-to-fine method for designing multi-cellular robots. Initially, this strategy seeks optimal coarse-grained robots and progressively refines them. To mitigate the challenge of determining the precise refinement juncture during the coarse-to-fine transition, we introduce the Hyperbolic Embeddings for Robot Design (HERD) framework. HERD unifies robots of various granularity within a shared hyperbolic space and leverages a refined Cross-Entropy Method for optimization. This framework enables our method to autonomously identify areas of exploration in hyperbolic space and concentrate on regions demonstrating promise. Finally, the extensive empirical studies on various challenging tasks sourced from EvoGym show our approach's superior efficiency and generalization capability.