Score Models for Offline Goal-Conditioned Reinforcement Learning
{kind=link}
Abstract
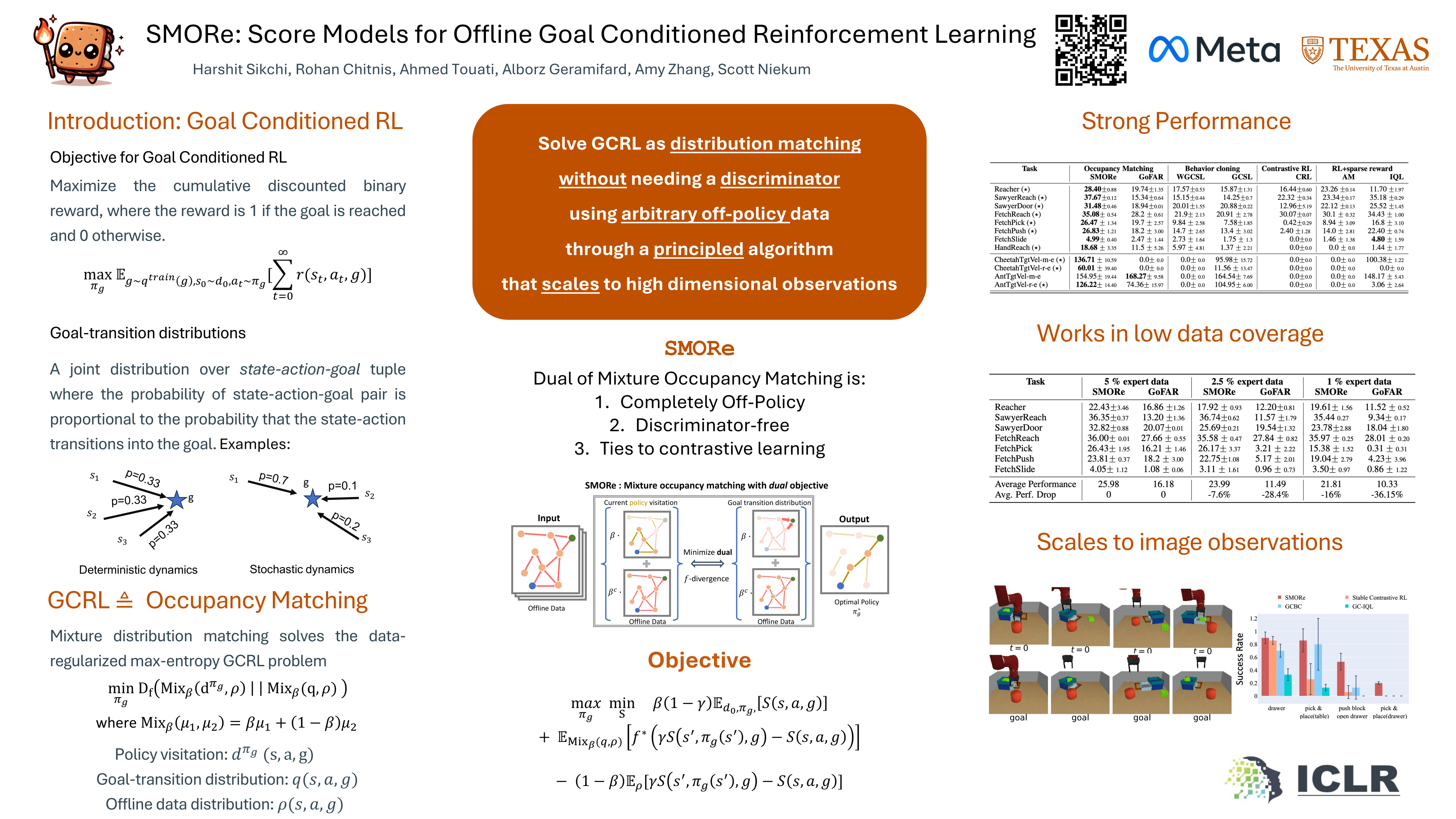
Offline Goal-Conditioned Reinforcement Learning (GCRL) is tasked with learning to achieve multiple goals in an environment purely from offline datasets using sparse reward functions. Offline GCRL is pivotal for developing generalist agents capable of leveraging pre-existing datasets to learn diverse and reusable skills without hand-engineering reward functions. However, contemporary approaches to GCRL based on supervised learning and contrastive learning are often suboptimal in the offline setting. An alternative perspective on GCRL optimizes for occupancy matching, but necessitates learning a discriminator, which subsequently serves as a pseudo-reward for downstream RL. Inaccuracies in the learned discriminator can cascade, negatively influencing the resulting policy. We present a novel approach to GCRL under a new lens of mixture-distribution matching, leading to our discriminator-free method: SMORe. The key insight is combining the occupancy matching perspective of GCRL with a convex dual formulation to derive a learning objective that can better leverage suboptimal offline data. SMORe learns scores or unnormalized densities representing the importance of taking an action at a state for reaching a particular goal. SMORe is principled and our extensive experiments on the fully offline GCRL benchmark composed of robot manipulation and locomotion tasks, including high-dimensional observations, show that SMORe can outperform state-of-the-art baselines by a significant margin.