Pre-Training Goal-based Models for Sample-Efficient Reinforcement Learning
{kind=link}
Abstract
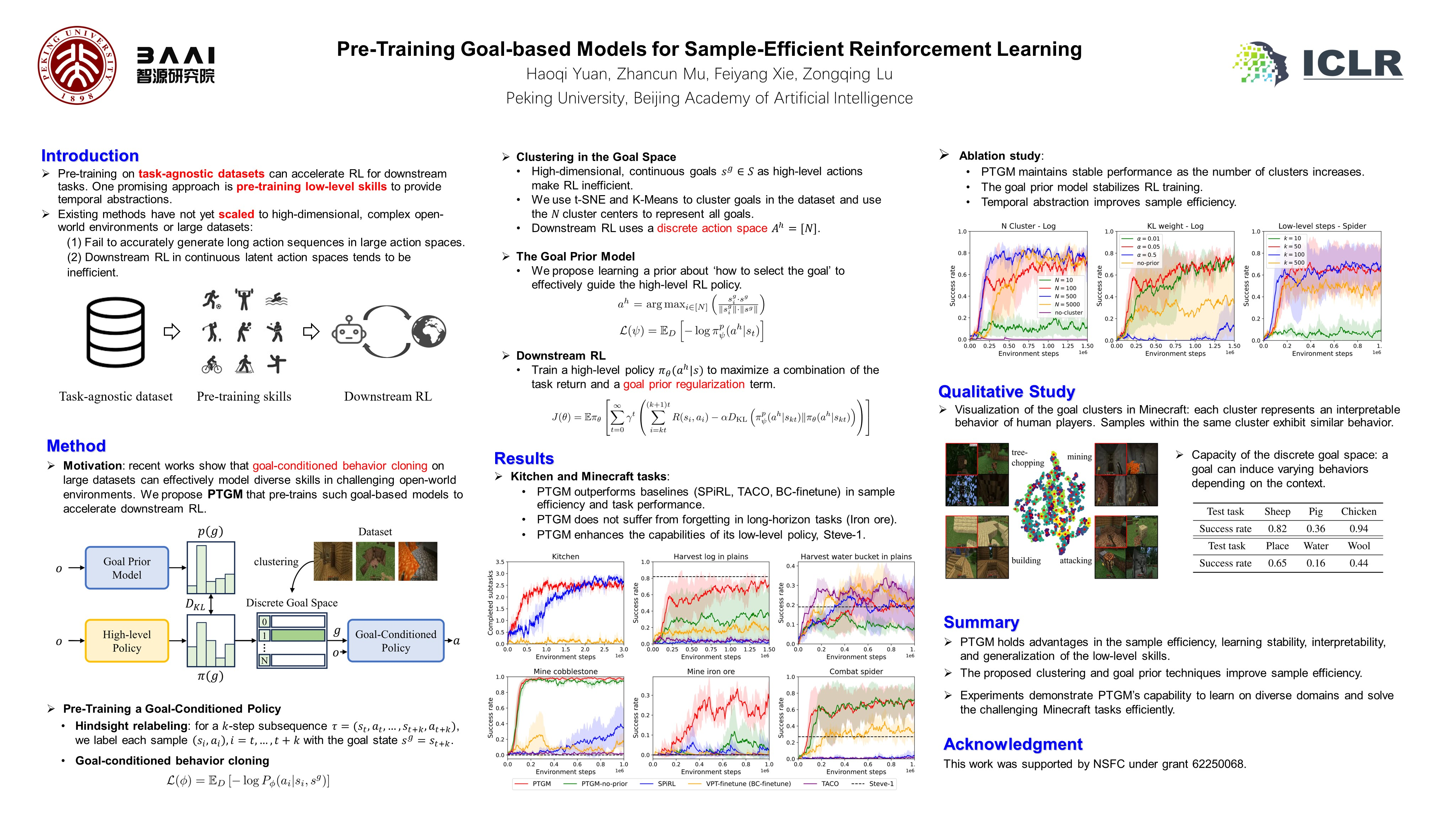
Pre-training on task-agnostic large datasets is a promising approach for enhancing the sample efficiency of reinforcement learning (RL) in solving complex tasks. We present PTGM, a novel method that pre-trains goal-based models to augment RL by providing temporal abstractions and behavior regularization. PTGM involves pre-training a low-level, goal-conditioned policy and training a high-level policy to generate goals for subsequent RL tasks. To address the challenges posed by the high-dimensional goal space, while simultaneously maintaining the agent's capability to accomplish various skills, we propose clustering goals in the dataset to form a discrete high-level action space. Additionally, we introduce a pre-trained goal prior model to regularize the behavior of the high-level policy in RL, enhancing sample efficiency and learning stability. Experimental results in a robotic simulation environment and the challenging open-world environment of Minecraft demonstrate PTGM’s superiority in sample efficiency and task performance compared to baselines. Moreover, PTGM exemplifies enhanced interpretability and generalization of the acquired low-level skills.