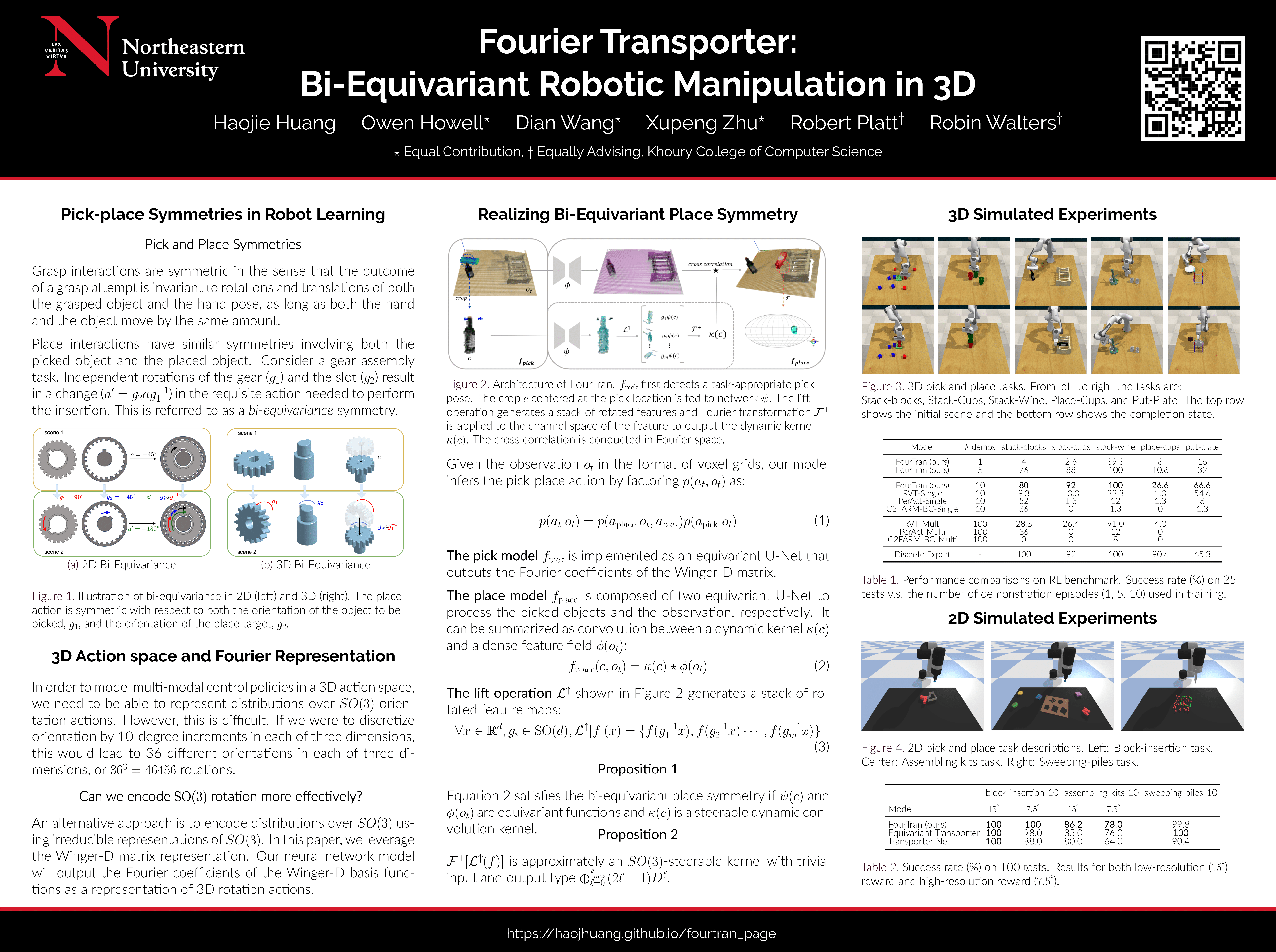
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Haojie Huang ⋅ Owen Howell ⋅ Dian Wang ⋅ Xupeng Zhu ⋅ Robert Platt ⋅ Robin Walters
2024 Poster
{kind=link}
Abstract
Many complex robotic manipulation tasks can be decomposed as a sequence of pick and place actions. Training a robotic agent to learn this sequence over many different starting conditions typically requires many iterations or demonstrations, especially in 3D environments. In this work, we propose Fourier Transporter ($\text{FourTran}$), which leverages the two-fold $\mathrm{SE}(d)\times\mathrm{SE}(d)$ symmetry in the pick-place problem to achieve much higher sample efficiency. $\text{FourTran}$ is an open-loop behavior cloning method trained using expert demonstrations to predict pick-place actions on new configurations. $\text{FourTran}$ is constrained by the symmetries of the pick and place actions independently. Our method utilizes a fiber space Fourier transformation that allows for memory-efficient computation. Tests on the RLbench benchmark achieve state-of-the-art results across various tasks.
Video
Chat is not available.
Successful Page Load