Harnessing Density Ratios for Online Reinforcement Learning
{kind=link}
Abstract
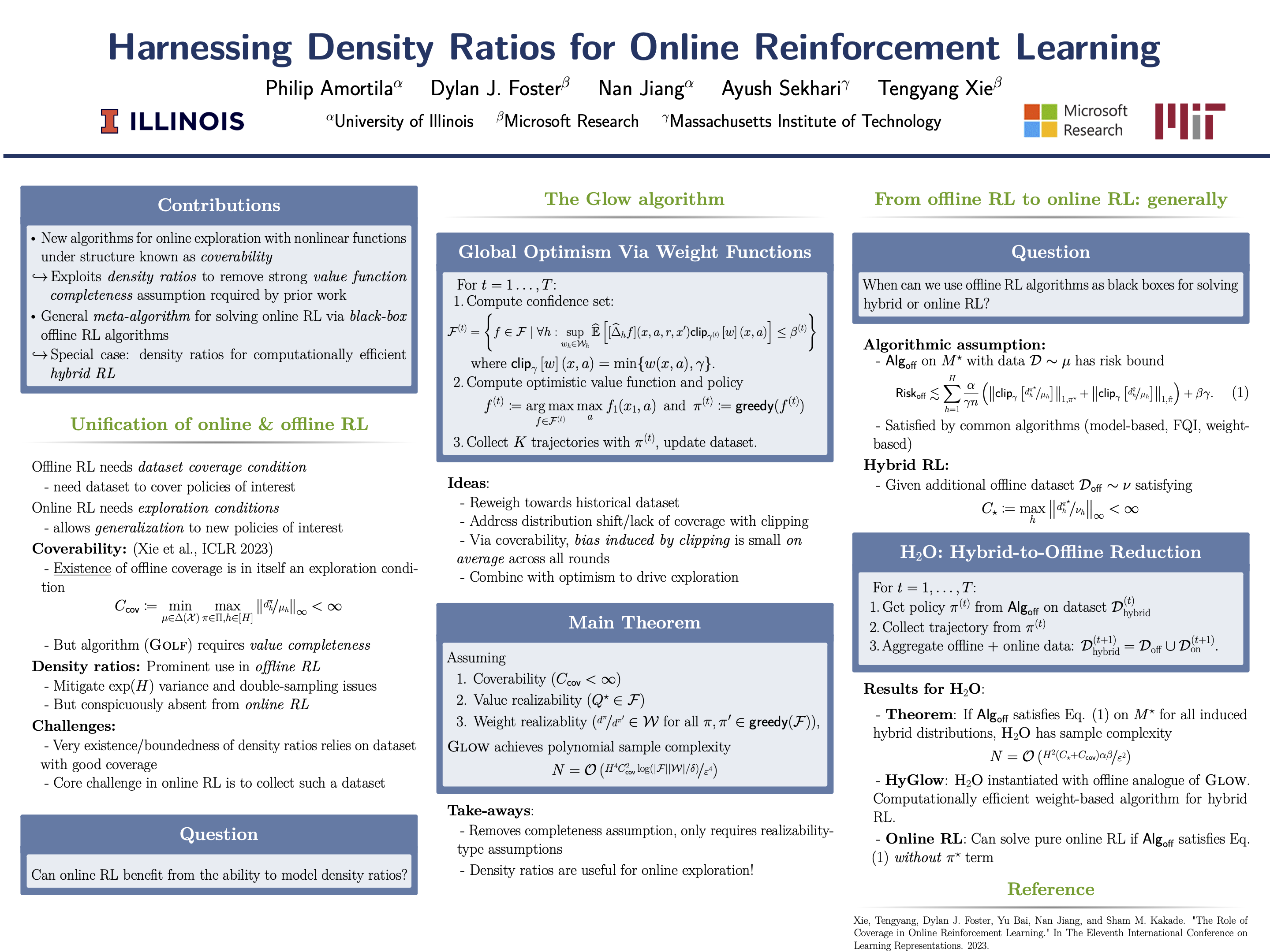
The theories of offline and online reinforcement learning, despite having evolved in parallel, have begun to show signs of the possibility for a unification, with algorithms and analysis techniques for one setting often having natural counterparts in the other. However, the notion of density ratio modeling, an emerging paradigm in offline RL, has been largely absent from online RL, perhaps for good reason: the very existence and boundedness of density ratios relies on access to an exploratory dataset with good coverage, but the core challenge in online RL is to collect such a dataset without having one to start.In this work we show---perhaps surprisingly---that density ratio-based algorithms have online counterparts. Assuming only the existence of an exploratory distribution with good coverage, a structural condition known as coverability (Xie et al., 2023), we give a new algorithm (GLOW) that uses density ratio realizability and value function realizability to perform sample-efficient online exploration. GLOW addresses unbounded density ratios via careful use of truncation, and combines this with optimism to guide exploration. GLOW is computationally inefficient; we complement it with a more efficient counterpart, HyGLOW, for the Hybrid RL setting (Song et al., 2023) wherein online RL is augmented with additional offline data. HyGLOW is derived as a special case of a more general meta-algorithm that provides a provable black-box reduction from hybrid RL to offline RL, which may be of independent interest.