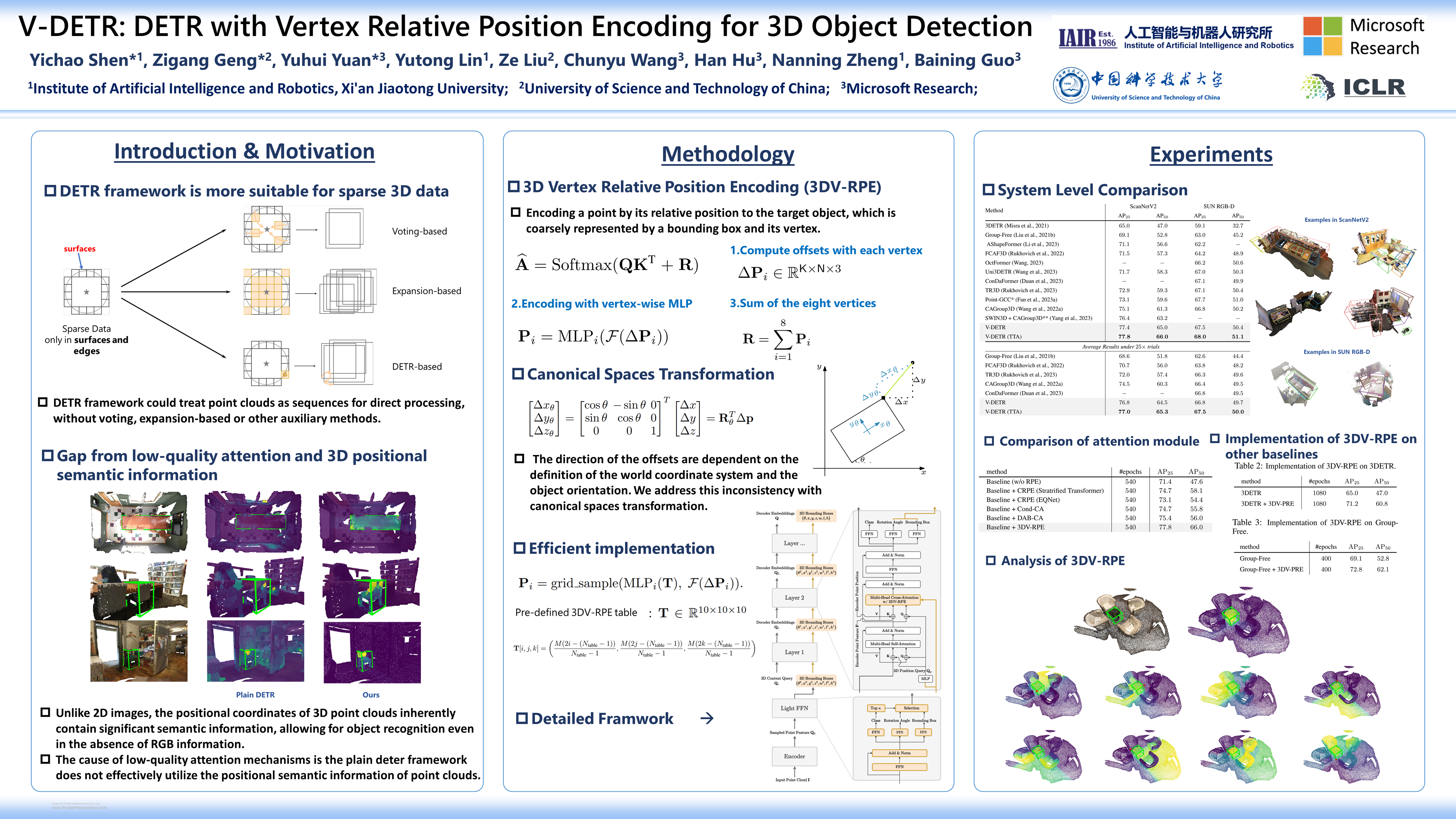
V-DETR: DETR with Vertex Relative Position Encoding for 3D Object Detection
Yichao Shen ⋅ Zigang Geng ⋅ YUHUI YUAN ⋅ Yutong Lin ⋅ Ze Liu ⋅ Chunyu Wang ⋅ Han Hu ⋅ Nanning Zheng ⋅ Baining Guo
2024 Poster
{kind=link}
Abstract
We introduce a highly performant 3D object detector for point clouds using the DETR framework. The prior attempts all end up with suboptimal results because they fail to learn accurate inductive biases from the limited scale of training data. In particular, the queries often attend to points that are far away from the target objects, violating the locality principle in object detection. To address the limitation, we introduce a novel 3D Vertex Relative Position Encoding (3DV-RPE) method which computes position encoding for each point based on its relative position to the 3D boxes predicted by the queries in each decoder layer, thus providing clear information to guide the model to focus on points near the objects, in accordance with the principle of locality. Furthermore, we have systematically refined our pipeline, including data normalization, to better align with the task requirements. Our approach demonstrates remarkable performance on the demanding ScanNetV2 benchmark, showcasing substantial enhancements over the prior state-of-the-art CAGroup3D. Specifically, we achieve an increase in $AP_{25}$ from $75.1\%$ to $77.8\%$ and in ${AP}_{50}$ from $61.3\%$ to $66.0\%$.
Video
Chat is not available.
Successful Page Load