CCIL: Continuity-Based Data Augmentation for Corrective Imitation Learning
{kind=link}
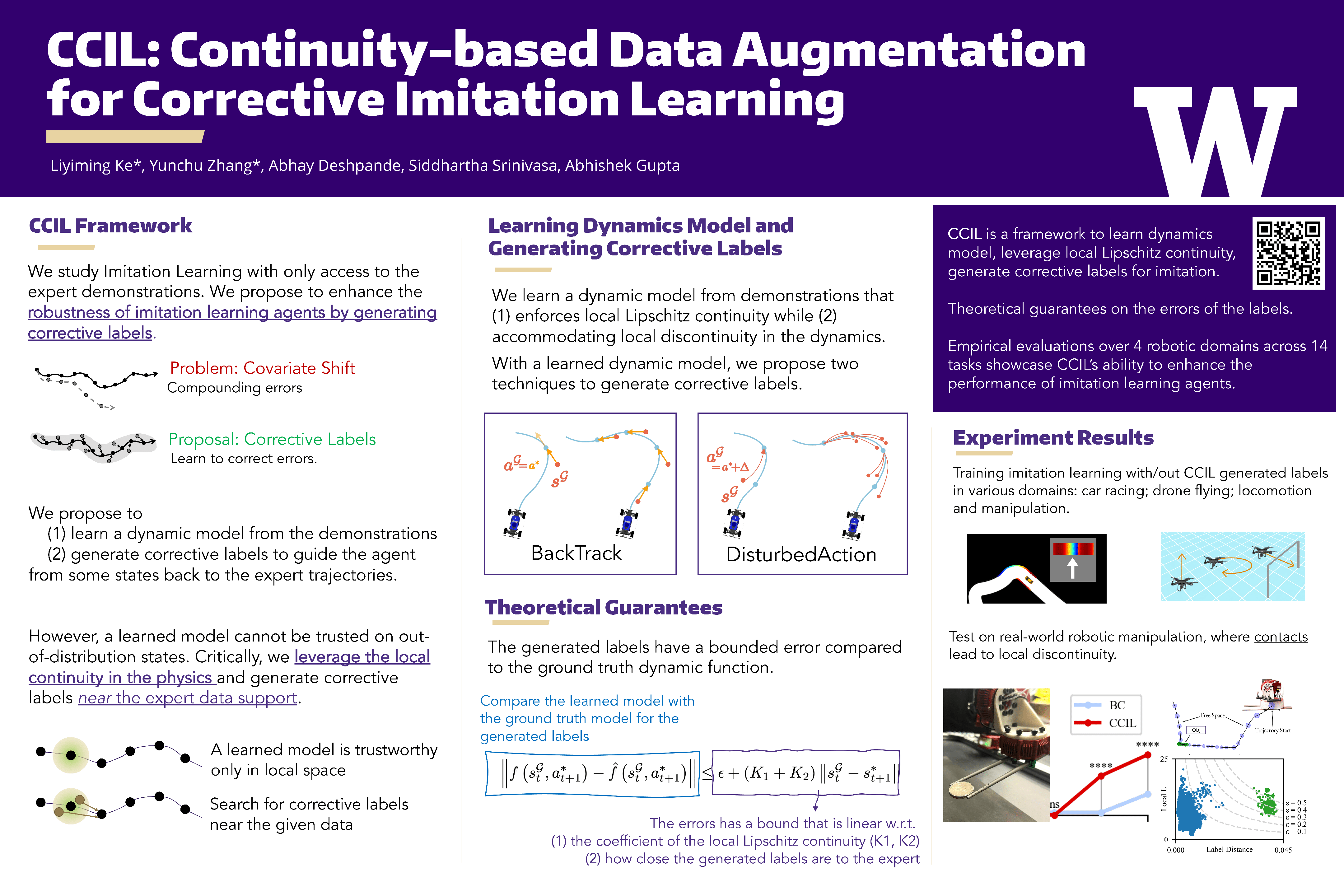
Abstract
We present a new technique to enhance the robustness of imitation learning methods by generating corrective data to account for compounding error and disturbances. While existing methods rely on interactive expert labeling, additional offline datasets, or domain-specific invariances, our approach requires minimal additional assumptions beyond expert data. The key insight is to leverage local continuity in the environment dynamics. Our method first constructs a dynamics model from the expert demonstration, enforcing local Lipschitz continuity while skipping the discontinuous regions. In the locally continuous regions, this model allows us to generate corrective labels within the neighborhood of the demonstrations but beyond the actual set of states and actions in the dataset. Training on this augmented data enhances the agent's ability to recover from perturbations and deal with compounding error. We demonstrate the effectiveness of our generated labels through experiments in a variety of robotics domains that have distinct forms of continuity and discontinuity, including classic control, drone flying, high-dimensional navigation, locomotion, and tabletop manipulation.