The Wasserstein Believer: Learning Belief Updates for Partially Observable Environments through Reliable Latent Space Models
{kind=link}
Abstract
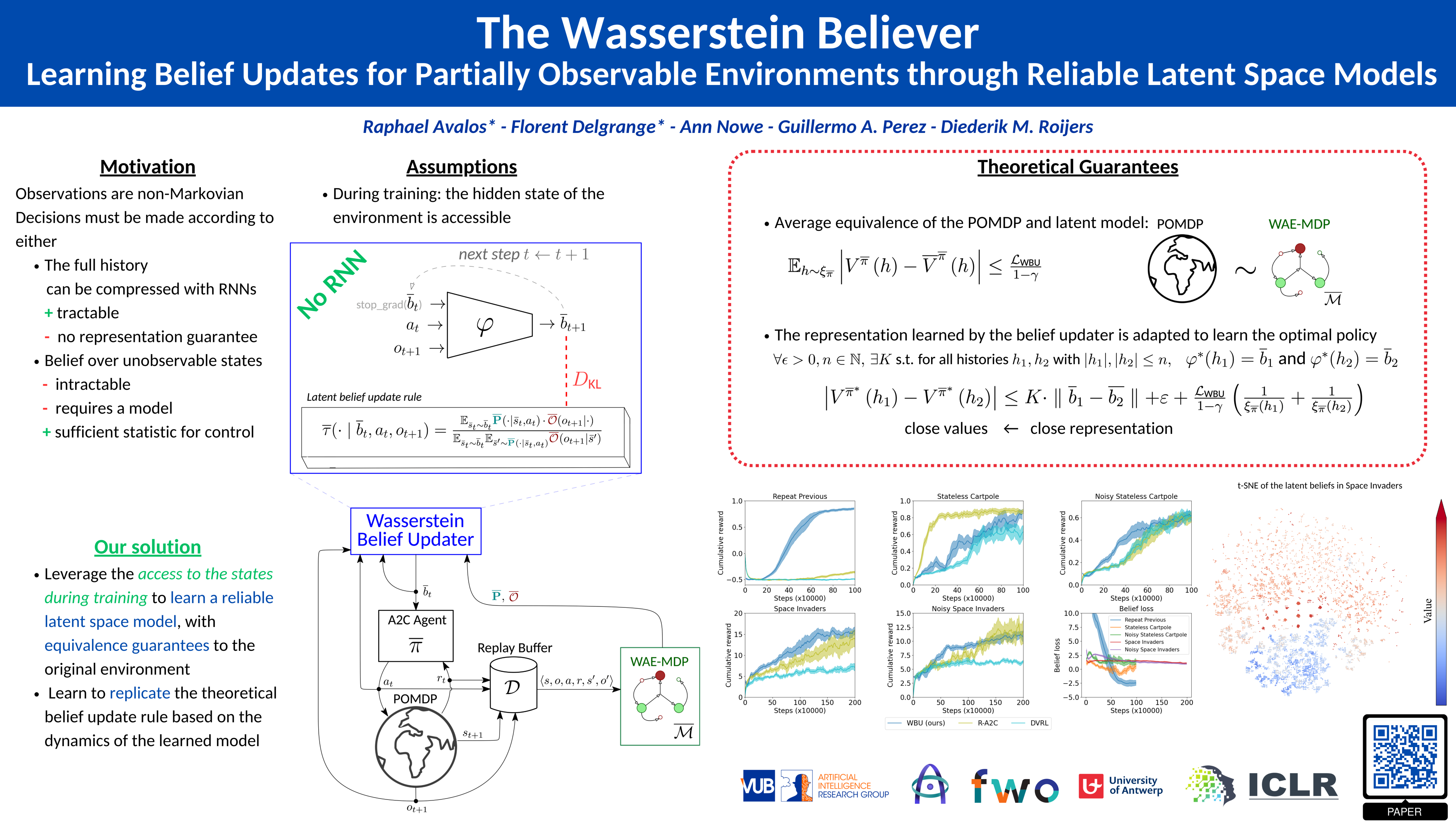
Partially Observable Markov Decision Processes (POMDPs) are used to model environments where the state cannot be perceived, necessitating reasoning based on past observations and actions. However, remembering the full history is generally intractable due to the exponential growth in the history space. Maintaining a probability distribution that models the belief over the current state can be used as a sufficient statistic of the history, but its computation requires access to the model of the environment and is often intractable. While SOTA algorithms use Recurrent Neural Networks to compress the observation-action history aiming to learn a sufficient statistic, they lack guarantees of success and can lead to sub-optimal policies. To overcome this, we propose the Wasserstein Belief Updater, an RL algorithm that learns a latent model of the POMDP and an approximation of the belief update under the assumption that the state is observable during training. Our approach comes with theoretical guarantees on the quality of our approximation ensuring that our latent beliefs allow for learning the optimal value function.