Efficient Multi-agent Reinforcement Learning by Planning
Qihan Liu ⋅ Jianing Ye ⋅ Xiaoteng Ma ⋅ Jun Yang ⋅ Bin Liang ⋅ Chongjie Zhang
2024 Poster
{kind=link}
Abstract
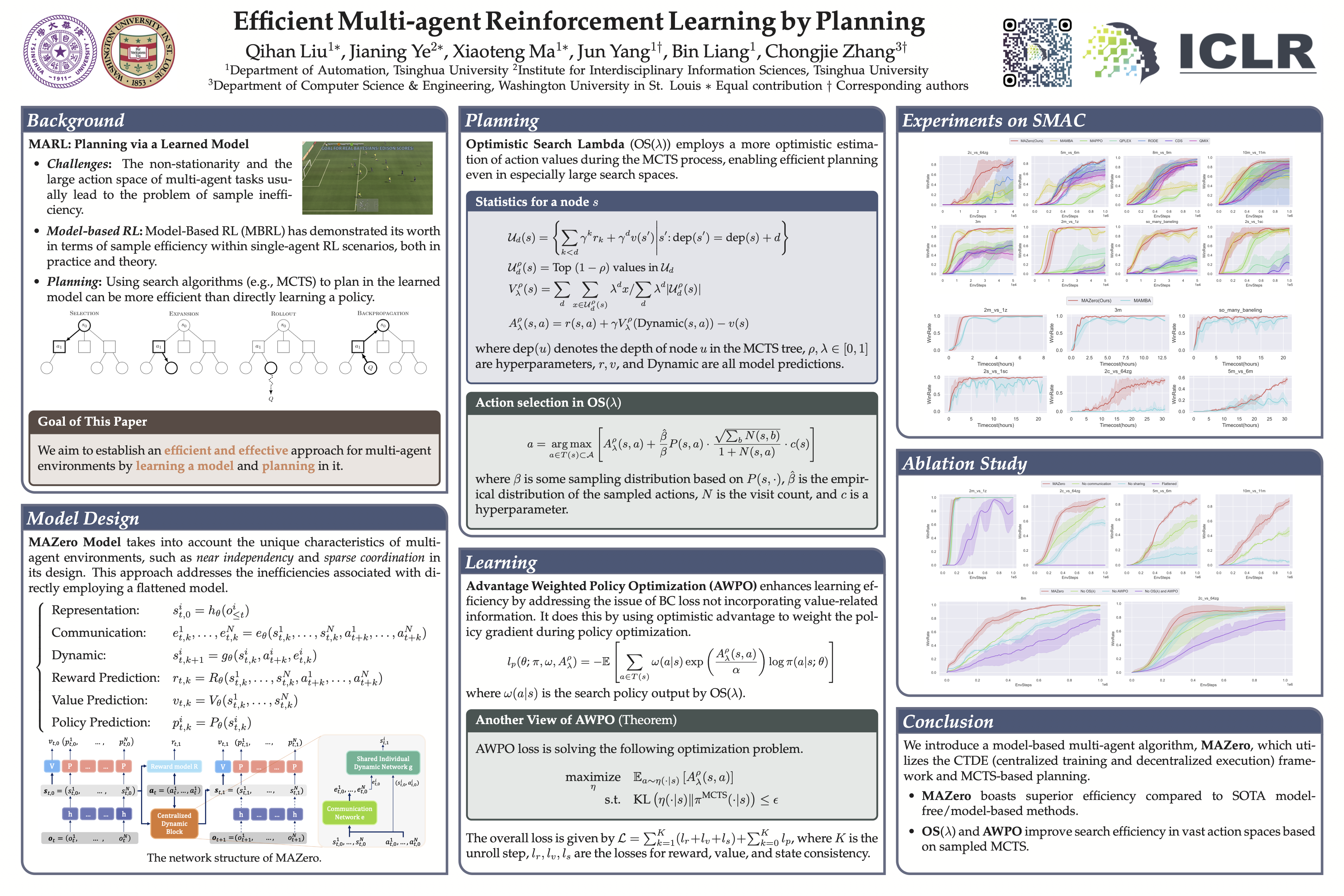
Multi-agent reinforcement learning (MARL) algorithms have accomplished remarkable breakthroughs in solving large-scale decision-making tasks. Nonetheless, most existing MARL algorithms are model-free, limiting sample efficiency and hindering their applicability in more challenging scenarios. In contrast, model-based reinforcement learning (MBRL), particularly algorithms integrating planning, such as MuZero, has demonstrated superhuman performance with limited data in many tasks. Hence, we aim to boost the sample efficiency of MARL by adopting model-based approaches. However, incorporating planning and search methods into multi-agent systems poses significant challenges. The expansive action space of multi-agent systems often necessitates leveraging the nearly-independent property of agents to accelerate learning. To tackle this issue, we propose the MAZero algorithm, which combines a centralized model with Monte Carlo Tree Search (MCTS) for policy search. We design an ingenious network structure to facilitate distributed execution and parameter sharing. To enhance search efficiency in deterministic environments with sizable action spaces, we introduce two novel techniques: Optimistic Search Lambda (OS($\lambda$)) and Advantage-Weighted Policy Optimization (AWPO). Extensive experiments on the SMAC benchmark demonstrate that MAZero outperforms model-free approaches in terms of sample efficiency and provides comparable or better performance than existing model-based methods in terms of both sample and computational efficiency.
Video
Chat is not available.
Successful Page Load