LRR: Language-Driven Resamplable Continuous Representation against Adversarial Tracking Attacks
{kind=link}
Abstract
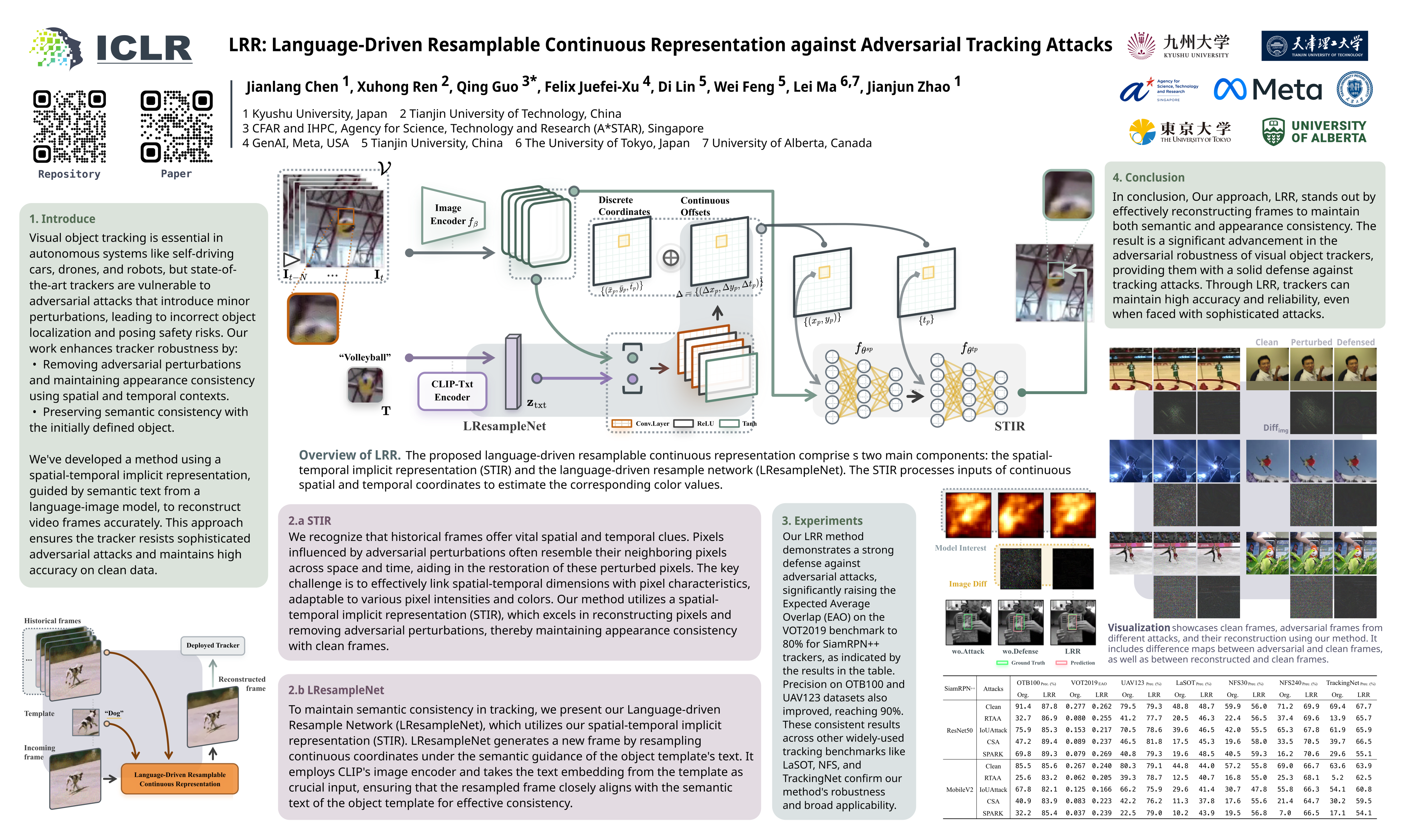
Visual object tracking plays a critical role in visual-based autonomous systems, as it aims to estimate the position and size of the object of interest within a live video. Despite significant progress made in this field, state-of-the-art (SOTA) trackers often fail when faced with adversarial perturbations in the incoming frames. This can lead to significant robustness and security issues when these trackers are deployed in the real world. To achieve high accuracy on both clean and adversarial data, we propose building a spatial-temporal continuous representation using the semantic text guidance of the object of interest. This novel continuous representation enables us to reconstruct incoming frames to maintain semantic and appearance consistency with the object of interest and its clean counterparts. As a result, our proposed method successfully defends against different SOTA adversarial tracking attacks while maintaining high accuracy on clean data. In particular, our method significantly increases tracking accuracy under adversarial attacks with around 90% relative improvement on UAV123, which is even higher than the accuracy on clean data.