On Trajectory Augmentations for Off-Policy Evaluation
{kind=link}
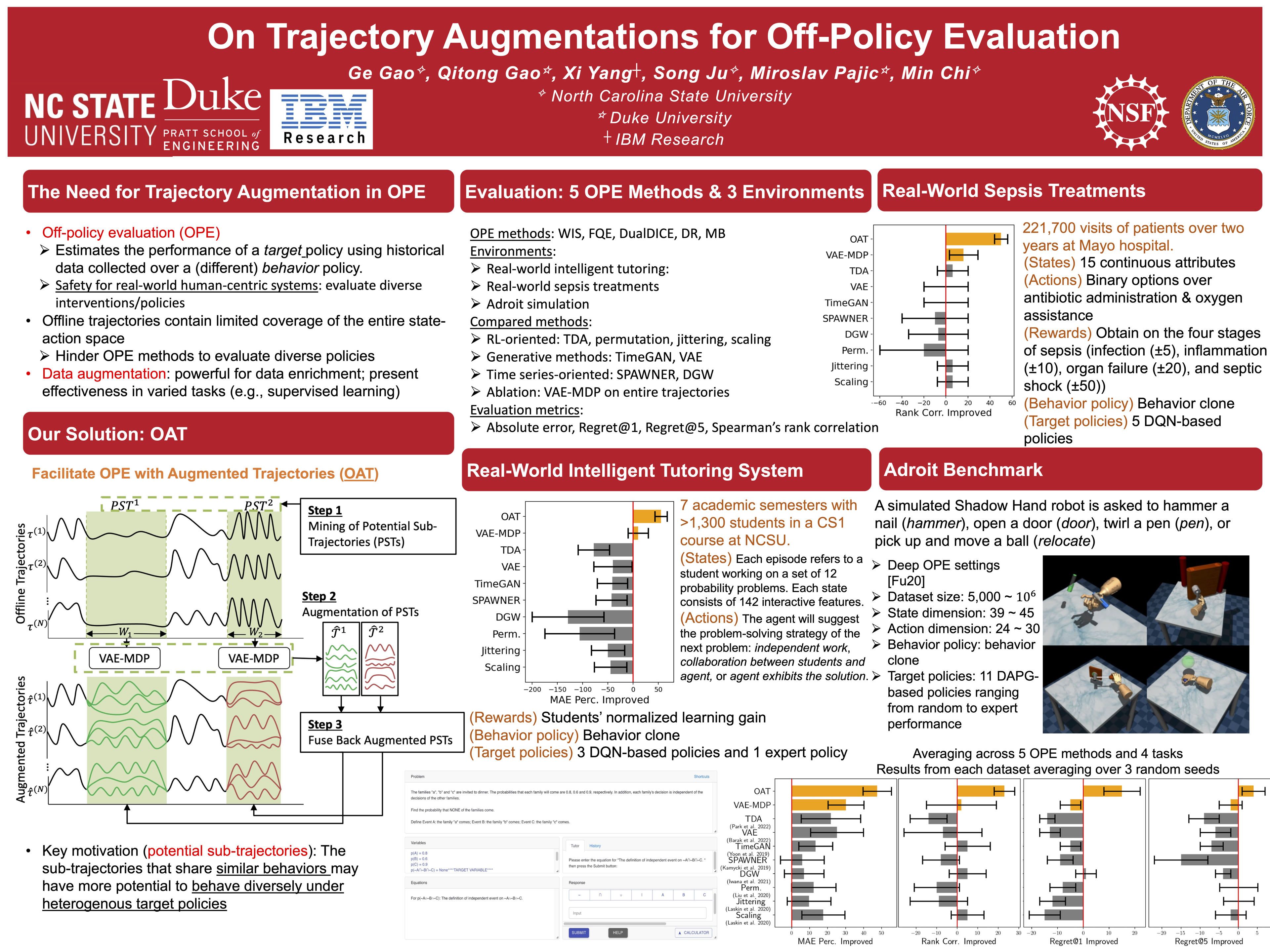
Abstract
In the realm of reinforcement learning (RL), off-policy evaluation (OPE) holds a pivotal position, especially in high-stake human-involved scenarios such as e-learning and healthcare. Applying OPE to these domains is often challenging with scarce and underrepresentative offline training trajectories. Data augmentation has been a successful technique to enrich training data. However, directly employing existing data augmentation methods to OPE may not be feasible, due to the Markovian nature within the offline trajectories and the desire for generalizability across diverse target policies. In this work, we propose an offline trajectory augmentation approach to specifically facilitate OPE in human-involved scenarios. We propose sub-trajectory mining to extract potentially valuable sub-trajectories from offline data, and diversify the behaviors within those sub-trajectories by varying coverage of the state-action space. Our work was empirically evaluated in a wide array of environments, encompassing both simulated scenarios and real-world domains like robotic control, healthcare, and e-learning, where the training trajectories include varying levels of coverage of the state-action space. By enhancing the performance of a variety of OPE methods, our work offers a promising path forward for tackling OPE challenges in situations where data may be limited or underrepresentative.