Horizon-Free Regret for Linear Markov Decision Processes
{kind=link}
Abstract
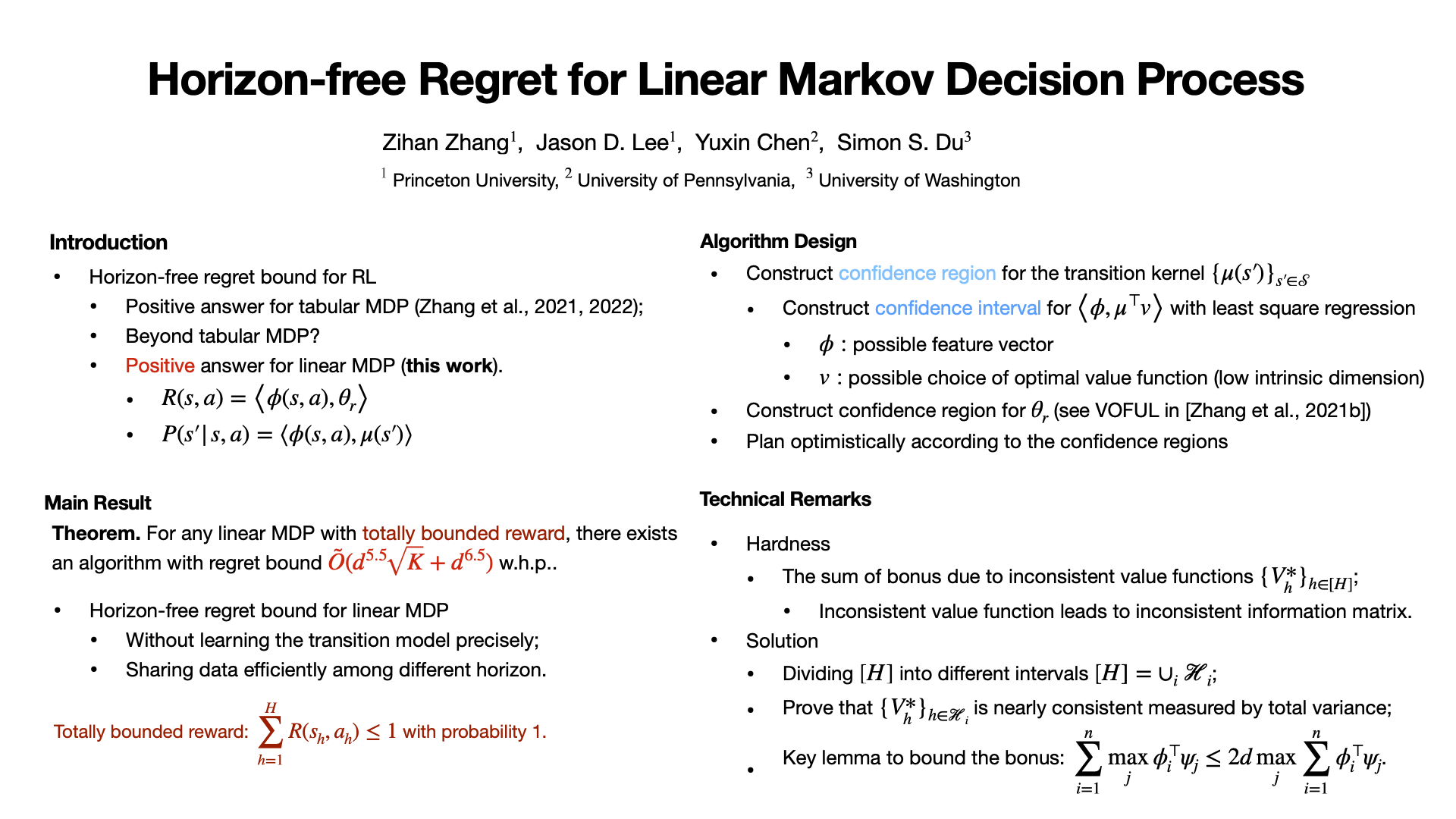
A recent line of works showed regret bounds in reinforcement learning (RL) can be (nearly) independent of planning horizon, a.k.a. the horizon-free bounds. However, these regret bounds only apply to settings where a polynomial dependency on the size of transition model is allowed, such as tabular Markov Decision Process (MDP) and linear mixture MDP. We give the first horizon-free bound for the popular linear MDP setting where the size of the transition model can be exponentially large or even uncountable. In contrast to prior works which explicitly estimate the transition model and compute the inhomogeneous value functions at different time steps, we directly estimate the value functions and confidence sets. We obtain the horizon-free bound by: (1) maintaining multiple weighted least square estimators for the value functions; and (2) a structural lemma which shows the maximal total variation of the inhomogeneous value functions is bounded by a polynomial factor of the feature dimension.