DeepSPF: Spherical SO(3)-Equivariant Patches for Scan-to-CAD Estimation
{kind=link}
Abstract
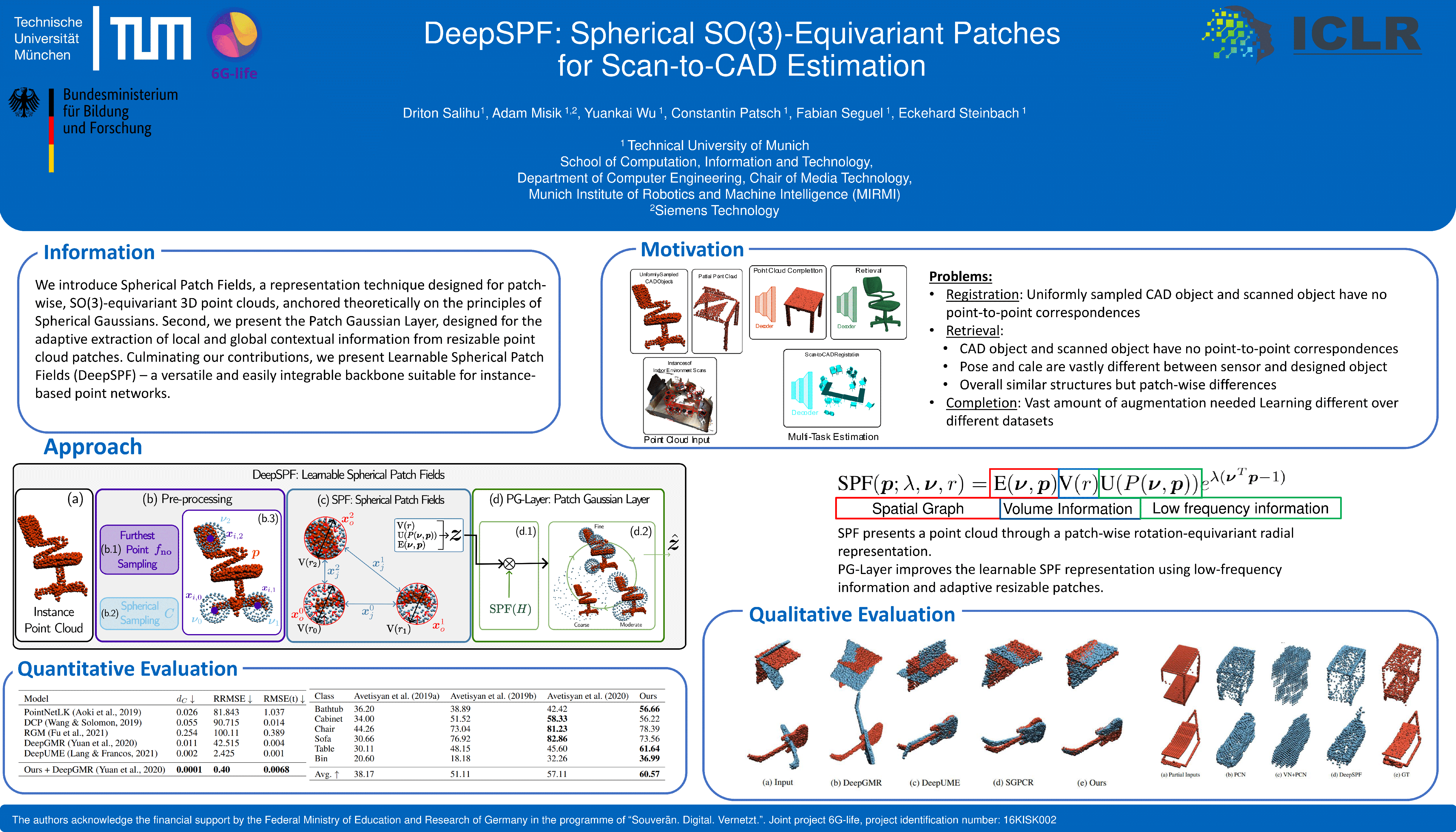
Recently, SO(3)-equivariant methods have been explored for 3D reconstruction via Scan-to-CAD.Despite significant advancements attributed to the unique characteristics of 3D data, existing SO(3)-equivariant approaches often fall short in seamlessly integrating local and global contextual information in a widely generalizable manner.Our contributions in this paper are threefold.First, we introduce Spherical Patch Fields, a representation technique designed for patch-wise, SO(3)-equivariant 3D point clouds, anchored theoretically on the principles of Spherical Gaussians.Second, we present the Patch Gaussian Layer, designed for the adaptive extraction of local and global contextual information from resizable point cloud patches.Culminating our contributions, we present Learnable Spherical Patch Fields (DeepSPF) – a versatile and easily integrable backbone suitable for instance-based point networks.Through rigorous evaluations, we demonstrate significant enhancements in Scan-to-CAD performance for point cloud registration, retrieval, and completion: a significant reduction in the rotation error of existing registration methods, an improvement of up to 17\% in the Top-1 error for retrieval tasks, and a notable reduction of up to 30\% in the Chamfer Distance for completion models, all attributable to the incorporation of DeepSPF.