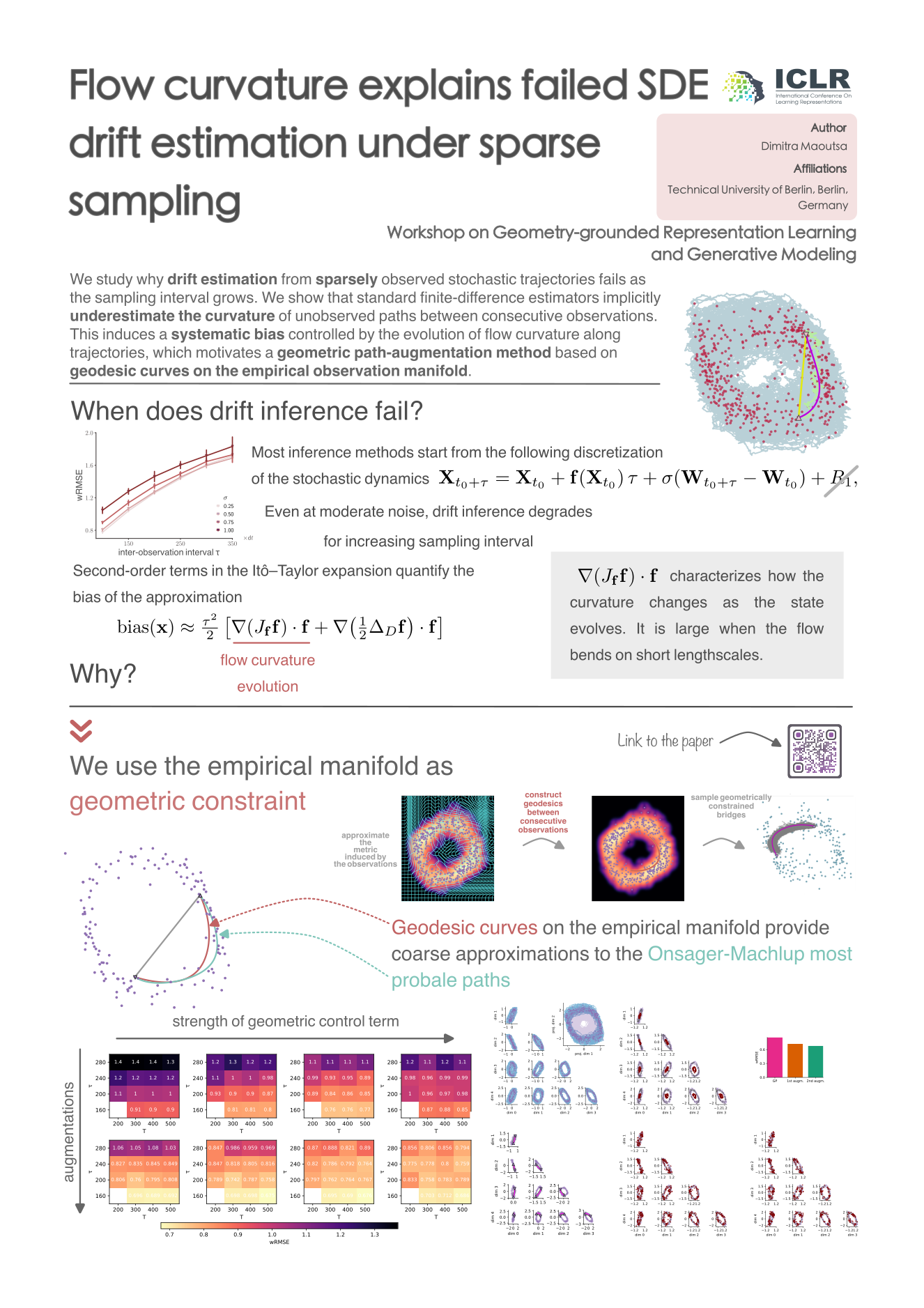
Flow curvature explains failed SDE drift estimation under sparse sampling
Dimitra Despoina Maoutsa
{kind=link}
Abstract
Drift estimation from sparsely observed stochastic trajectories usually performs poorly as the sampling interval $\tau$ grows, even for moderate dynamical noise. A common probabilistic account attributes this breakdown to the transition density becoming markedly non-Gaussian in nonlinear systems. Here, we provide a complementary dynamical perspective, and **show that the curvature of the underlying flow field and its evolution along trajectories** determines the bias introduced during inference in these settings. To mitigate this effect, we introduce a method that accounts for the flow field curvature by approximating the geodesic curves between consecutive observations computed on the Riemannian manifold induced by an estimate of the system’s invariant density from the measurements. In experiments on nonlinear non-conservative Langevin systems, this geometric consideration substantially improves drift recovery at large sampling intervals.
Chat is not available.
Successful Page Load