[Tiny Paper] Safe Streaming Flow Planning by Aligning Generation with Execution
{kind=link}
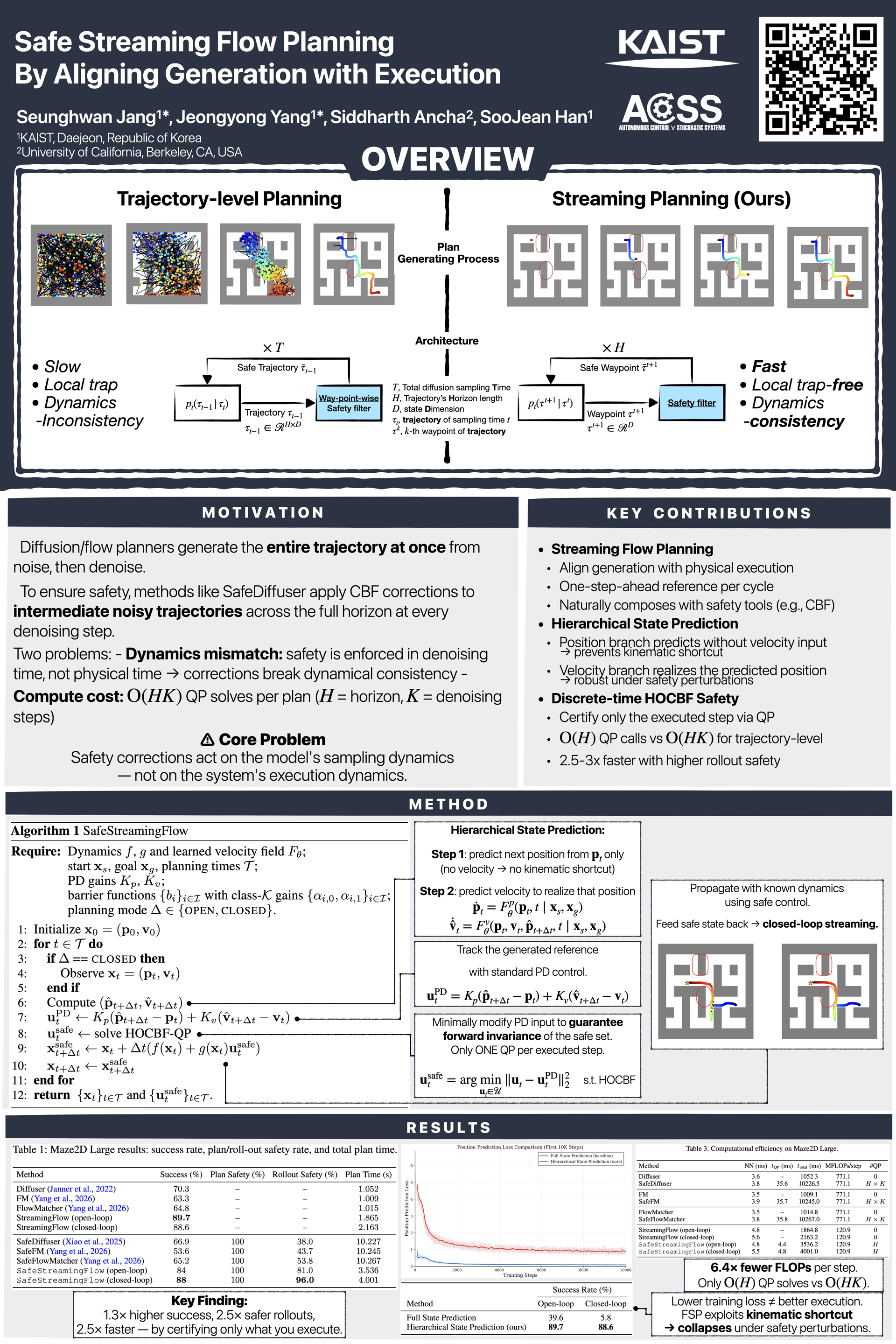
Abstract
Generative planners based on diffusion/flow-matching can learn to synthesize long-horizon trajectories from demonstrations. However, real-world deployment requires (i) certified collision avoidance and (ii) tight online replanning at fast execution rates. Prior safe diffusion/flow planners generate the agent's full trajectory at once, while repeatedly projecting intermediate noisy trajectories to satisfy barrier constraints. This approach is not only computationally intensive, but also introduces distribution shift since the learned sampling dynamics is distinct from the system's execution dynamics. We propose SafeStreamingFlow, a goal-conditioned planner that aligns flow sampling dynamics with execution dynamics by sequentially integrating a learned state-space vector field. Importantly, we need to certify safety only for the executed step via discrete-time high order control barrier functions. To improve robustness, we introduce a hierarchical network architecture that predicts the next position before predicting the next physical velocity. On D4RL Maze2D, SafeStreamingFlow reduces planning latency and improves execution-time safety compared to prior methods, while maintaining competitive goal-reaching success.