Model-based Offline RL via Robust Value-Aware Model Learning with Implicitly Differentiable Adaptive Weighting
{kind=link}
Abstract
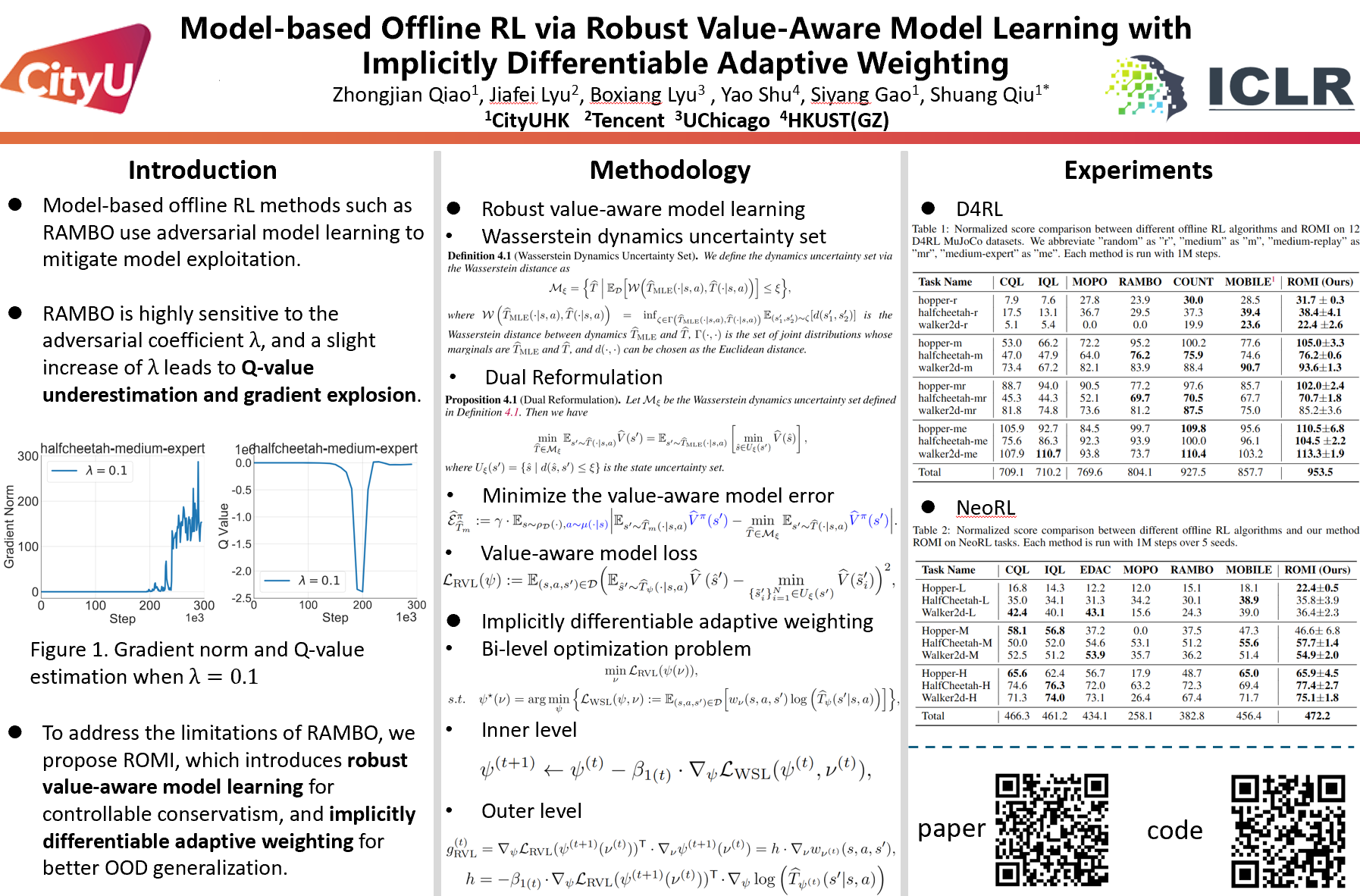
Model-based offline reinforcement learning (RL) aims to enhance offline RL with a dynamics model that facilitates policy exploration. However, model exploitation could occur due to inevitable model errors, which degrades algorithm performance. Adversarial model learning offers a theoretical framework to mitigate model exploitation by solving a maximin formulation, and RAMBO provides a practical implementation with model gradient. However, we empirically observe that severe Q-value underestimation and gradient explosion can occur in RAMBO with only slight hyperparameter tuning, suggesting that it tends to be overly conservative and suffers from unstable model updates. To address these issues, we propose RObust value-aware Model learning via Implicitly differentiable adaptive weighting (ROMI). Instead of updating the dynamics model with model gradient, ROMI introduces a novel robust value-aware model learning approach. This approach requires the dynamics model to predict future states with values close to the minimum Q-value within a scale-adjustable state uncertainty set, enabling controllable conservatism and stable model updates. To further improve out-of-distribution (OOD) generalization during multi-step rollouts, we propose implicitly differentiable adaptive weighting, a bi-level optimization scheme that adaptively achieves dynamics- and value-aware model learning. Empirical results on D4RL and NeoRL datasets show that ROMI significantly outperforms RAMBO and achieves competitive or superior performance compared to state-of-the-art methods on datasets where RAMBO typically underperforms.