Human3R: Everyone Everywhere All at Once
{kind=link}
Abstract
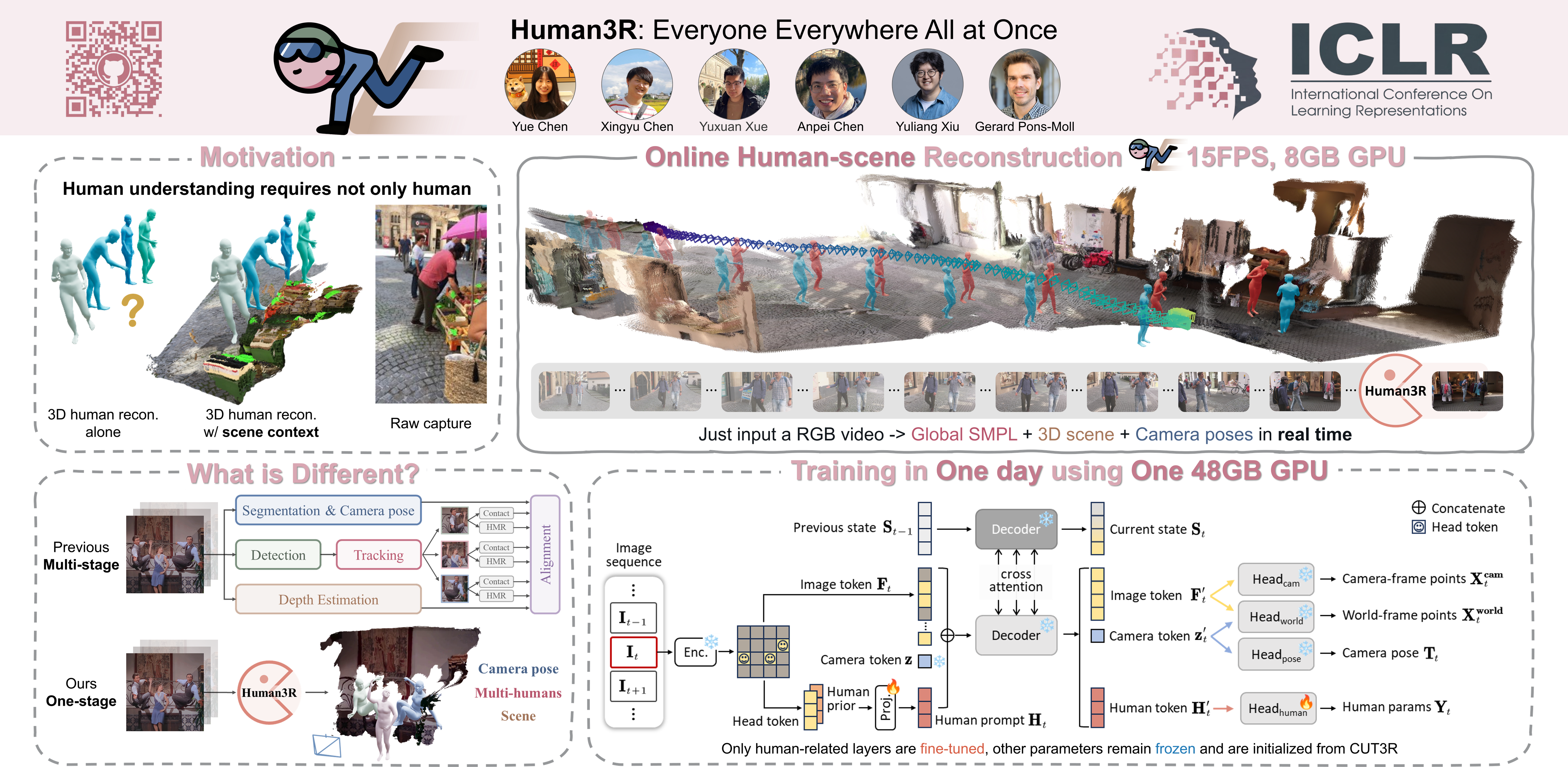
We present Human3R, a unified, feed-forward framework for online 4D human-scene reconstruction, in the world frame, from casually captured monocular videos. Unlike previous approaches that rely on multi-stage pipelines, iterative contact-aware refinement between humans and scenes, and heavy dependencies, e.g., human detection, depth estimation, and SLAM pre-processing, Human3R jointly recovers global multi-person SMPL-X bodies (“everyone”), dense 3D scene (“everywhere”), and camera trajectories in a single forward pass (“all-at-once”). Our method builds upon the 4D online reconstruction model CUT3R, and uses parameter-efficient visual prompt tuning, to strive to preserve CUT3R’s rich spatiotemporal priors, while enabling direct readout of multiple SMPL-X bodies. Human3R is a unified model that eliminates heavy dependencies and iterative refinement. After being trained on the relatively small-scale synthetic dataset BEDLAM for just one day on one GPU, it achieves superior performance with remarkable efficiency: it reconstructs multiple humans in a one-shot manner, along with 3D scenes, in one stage, in real-time (15 FPS) with a low memory footprint (8 GB). Extensive experiments demonstrate that Human3R delivers state-of-the-art or competitive performance across tasks, including global human motion estimation, local human mesh recovery, video depth estimation, and camera pose estimation, with a single unified model. We hope that Human3R will serve as a simple yet strong baseline, which can be easily adapted for downstream applications. Code, models and 4D interactive demos are available at https://fanegg.github.io/Human3R/.