Point-UQ: An Uncertainty-Quantification Paradigm for Point Cloud Few-Shot Class Incremental Learning
{kind=link}
Abstract
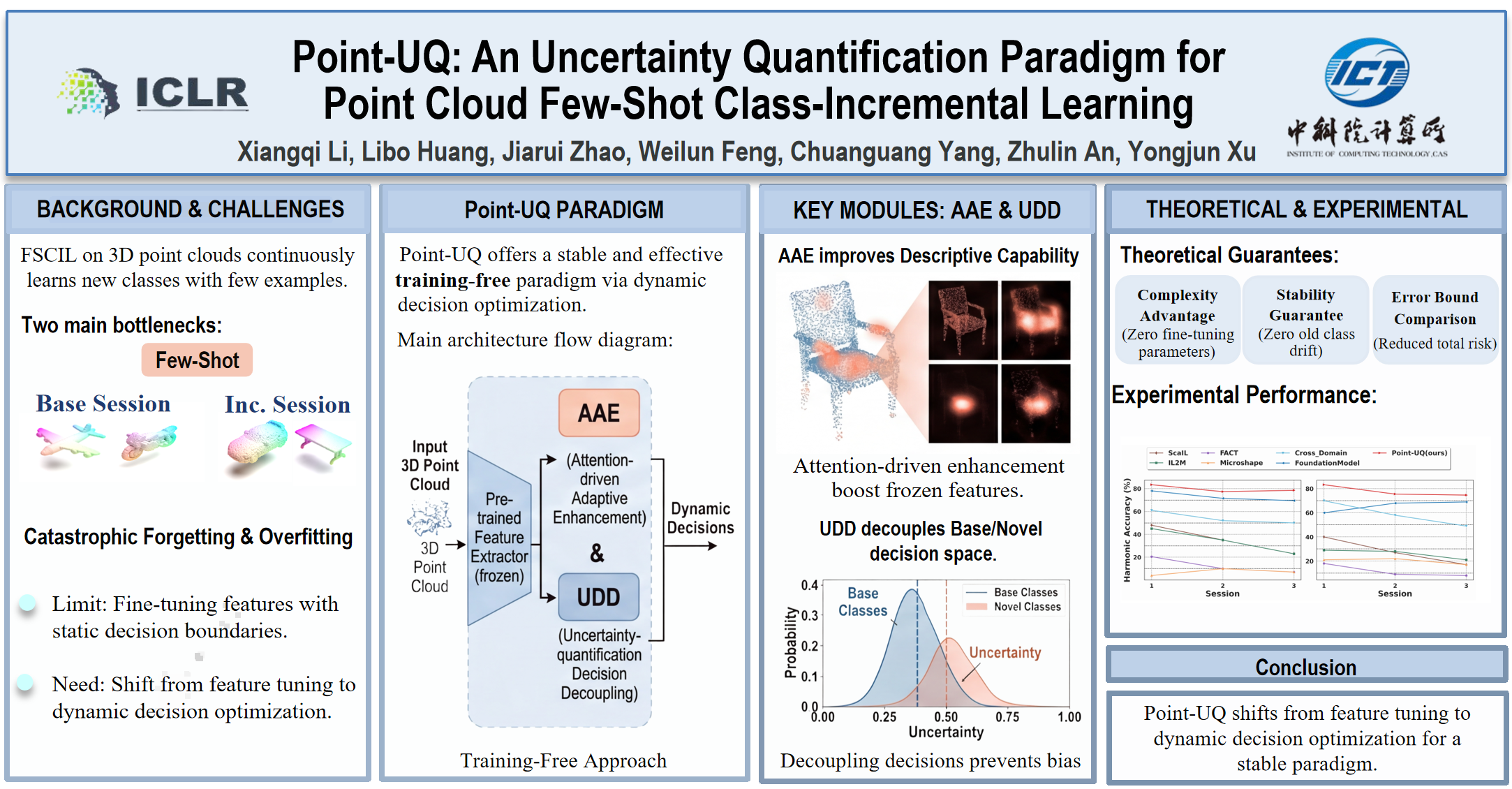
3D few-shot class-incremental learning (3D FSCIL) requires effectively integrating novel classes from limited samples while preserving base-class knowledge, without succumbing to catastrophic forgetting the learned knowledge or overfitting the novel ones. Current 3D FSCIL approaches predominantly focus on fine-tuning feature representations yet retain static decision boundaries. This leads to a critical trade-off: excessive adaptation to new samples tends to erase previously learned knowledge, while insufficient adaptation hinders novel-class recognition. We argue that the key to effective incremental learning lies not only in feature enhancement but also in adaptive decision-making. To this end, we introduce Point-UQ, an incremental training-free paradigm for 3D point clouds based on uncertainty quantification, which shifts the focus from feature tuning to dynamic decision optimization. Point-UQ comprises two co-designed modules: Attention-driven Adaptive Enhancement (AAE) and Uncertainty-quantification Decision Decoupling (UDD). The former module fuses multi-scale features into calibrated representations, where prediction entropy serves as a reliable measure of per-sample epistemic uncertainty while preserving original feature semantics. Building on AAE-derived calibrated entropy, the UDD module dynamically arbitrates between semantic classifiers and geometric prototypes—enabling robust base-class knowledge retention and accurate novel-class recognition in 3D FSCIL without retraining. Extensive experiments on ModelNet, ShapeNet, ScanObjectNN, and CO3D demonstrate that our approach outperforms state-of-the-art methods by 4% in average accuracy, setting a new standard for robust 3D incremental learning.