Micro-Macro Coupled Koopman Modeling on Graph for Traffic Flow Prediction
{kind=link}
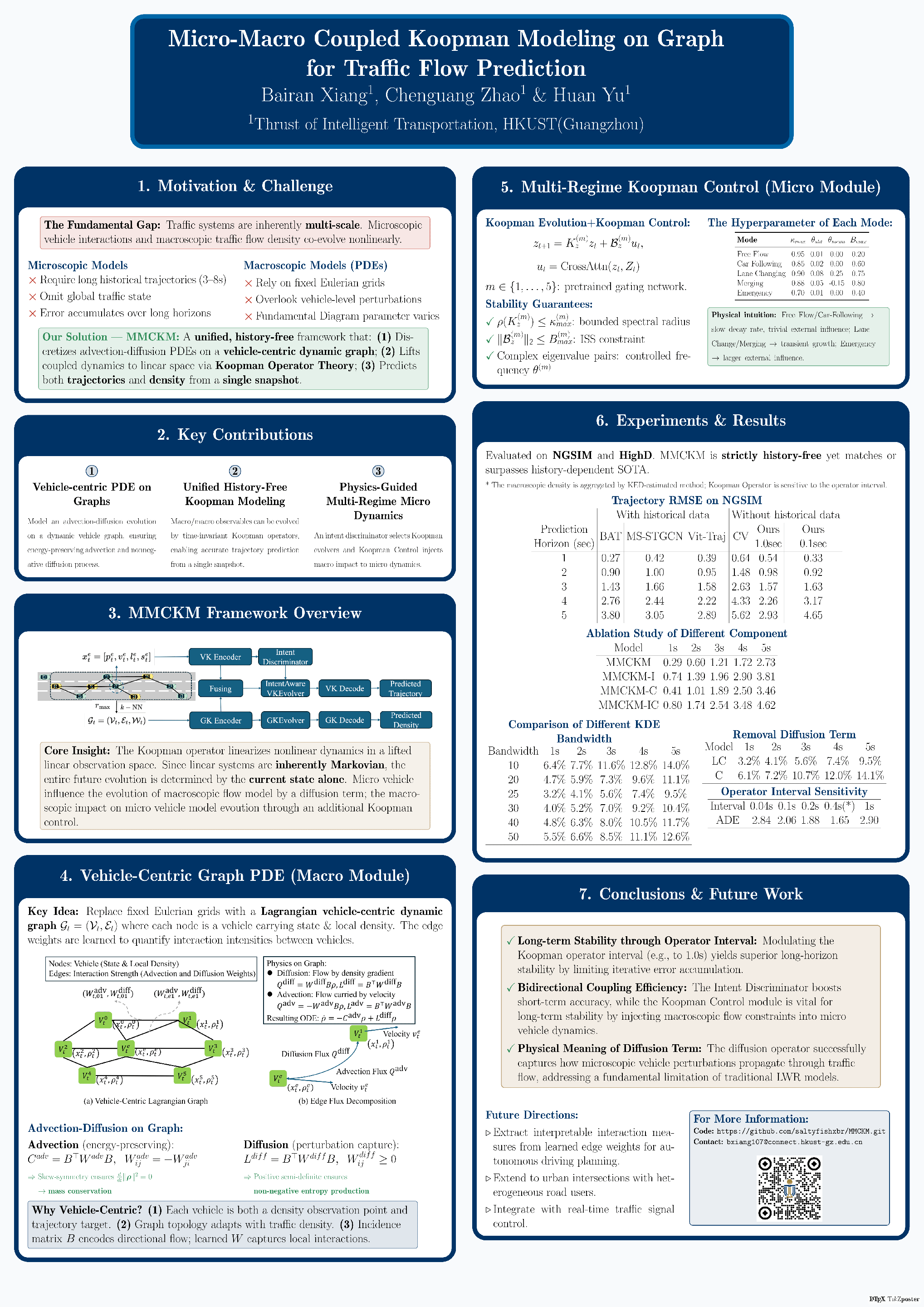
Abstract
Traffic systems are inherently multi-scale: microscopic vehicle interactions and macroscopic flow co-evolve nonlinearly. Microscopic models capture local interactions but miss flow evolution; macroscopic models enforce aggregated consistency yet overlook stochastic vehicle-level dynamics. We propose Micro–Macro Coupled Koopman Modeling (MMCKM), which lifts the coupled dynamics to a high-dimensional linear observation space for a unified linear-operator representation. Unlike grid-based discretizations, MMCKM adopts a vehicle-centric dynamic graph that preserves microscopic perturbations while respecting macroscopic conservation laws by discretizing PDEs onto this graph. At the micro scale, scenario-adaptive Koopman evolvers selected by an Intent Discriminator are designed to model vehicle dynamics. A Koopman control module explicitly formulate how flow state influences individual vehicles, yielding bidirectional couplings. To our knowledge, this is the first work to jointly model vehicle trajectories and traffic flow density using a unified Koopman framework without requiring historical trajectories. The proposed MMCKM is validated for trajectory prediction on NGSIM and HighD. While MMCKM uses only real-time measurement, it achieves comparable or even higher accuracy than history-dependent baselines. We further analyze the effect of the operator interval and provide ablations to show the improvement by intent inference, macro-to-micro control, and diffusion. Code and implementation details are included to facilitate reproducibility.