SkyEvents: A Large-Scale Event-enhanced UAV Dataset for Robust 3D Scene Reconstruction
{kind=link}
Abstract
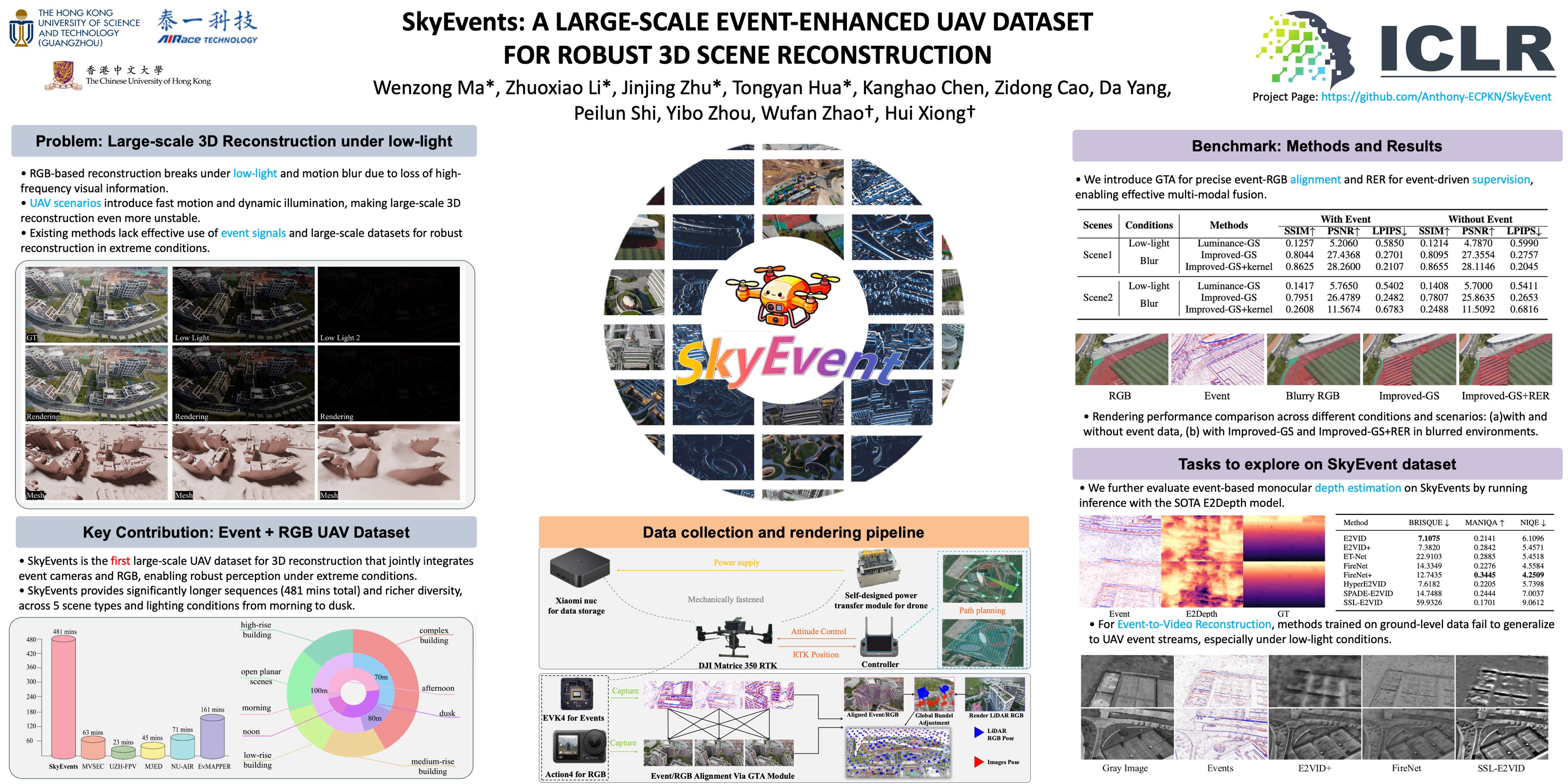
Recent advances in large-scale 3D scene reconstruction using unmanned aerial vehicles (UAVs) have spurred increasing interest in neural rendering techniques. However, existing approaches with conventional cameras struggle to capture consistent multi-view images of scenes, particularly in extremely blurred and low-light environments, due to the inherent limitations in dynamic range caused by long exposure and motion blur resulting from camera motion. As a promising solution, bio-inspired event cameras exhibit robustness in extreme scenarios, due to their high dynamic range and microsecond-level temporal resolution. Nevertheless, dedicated event datasets specifically tailored for large-scale UAV 3D scene reconstruction remain limited. To bridge this gap, we introduce SkyEvents, a pioneering large-scale event-enhanced UAV dataset for 3D scene reconstruction, incorporating RGB, event, and LiDAR data. SkyEvents encompasses 45 sequences, spanning over 8 hours of video, captured across a diverse set of illumination conditions, scenarios, and flight altitudes. To facilitate the event-based 3D scene reconstruction with SkyEvents, we propose the Geometry-constrained Timestamp Alignment (GTA) module to align timestamps between the event and RGB cameras. Furthermore, we introduce a Region-wise Event Rendering (RER) loss for supervising the rendering optimization. With SkyEvents, we aim to motivate and equip researchers to advance large-scale 3D scene reconstruction in challenging environments, harnessing the unique strengths of event cameras. Dataset and code will be available at https://github.com/Anthony-ECPKN/SkyEvent.