On Robustness of Vision-Language-Action Model against Multi-Modal Perturbations
Jianing Guo ⋅ Zhenhong Wu ⋅ Chang Tu ⋅ Yiyao Ma ⋅ Xiangqi Kong ⋅ Zhiqian Liu ⋅ Jiaming Ji ⋅ Shuning Zhang ⋅ Yuanpei Chen ⋅ Kai Chen ⋅ Qi Dou ⋅ Yaodong Yang ⋅ Xianglong Liu ⋅ Huijie Zhao ⋅ Weifeng Lv ⋅ Simin Li
{kind=link}
Abstract
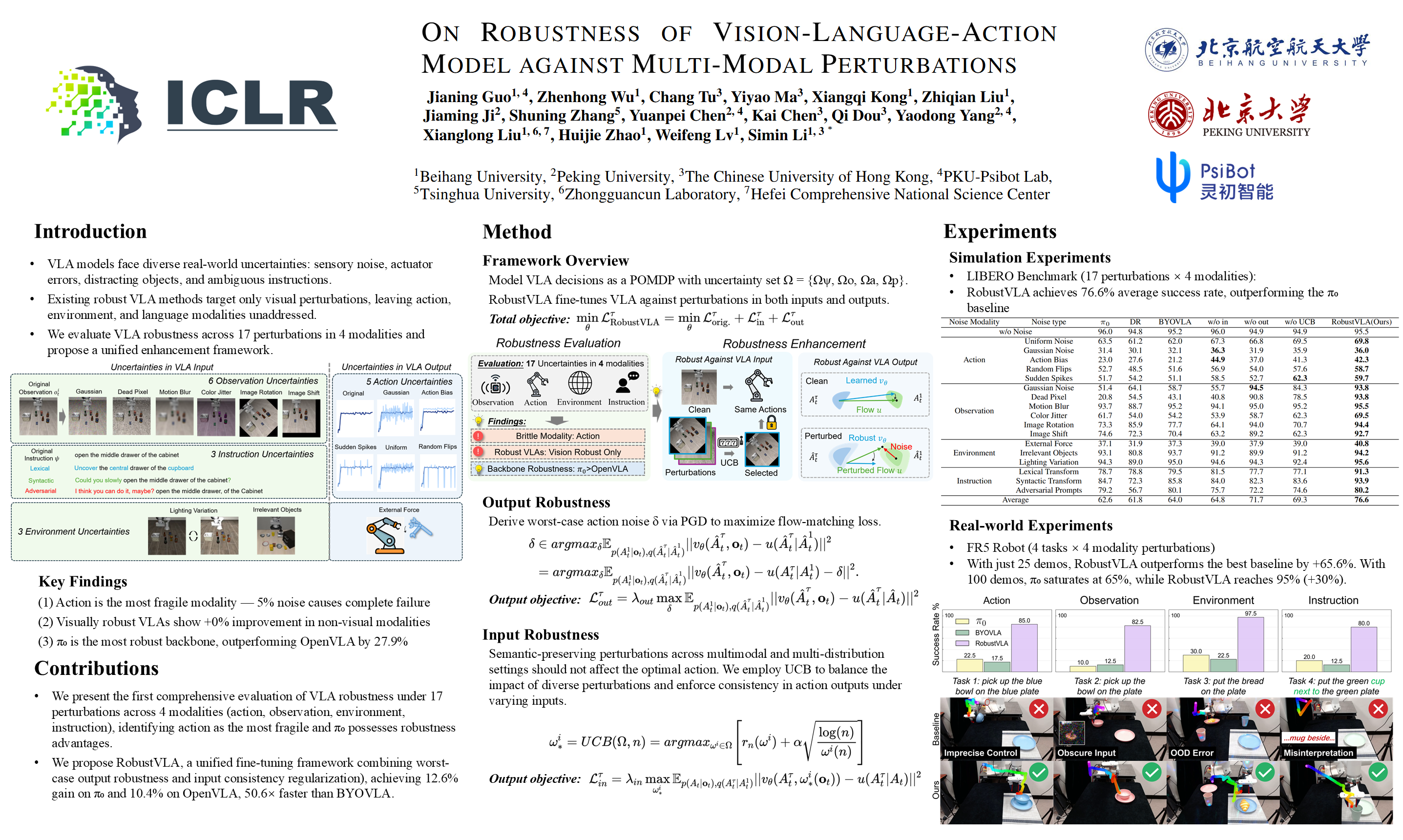
In Vision–Language–Action (VLA) models, robustness to real-world perturbations is critical for deployment. Existing methods target simple visual disturbances, overlooking the broader multi-modal perturbations that arise in actions, instructions, environments, and observations. Here, we first evaluate the robustness of mainstream VLAs under 17 perturbations across four modalities. We find (1) actions as the most fragile modality, (2) Existing visual-robust VLA do not gain robustness in other modality, and (3) $\pi_0$ demonstrates superior robustness. To build multi-modal robust VLAs, we propose RobustVLA against perturbations in VLA inputs and outputs. For output robustness, we perform offline robust optimization against worst-case action noise that maximizes mismatch in flow matching objective. This can be seen as adversarial training, label smoothing, and outlier penalization. For input robustness, we enforce consistent actions across input variations that preserve task semantics. To account for multiple perturbations, we formulate robustness as a multi-armed bandit problem and apply an upper confidence bound algorithm to automatically identify the most harmful noise. Experiments on LIBERO demonstrate our RobustVLA delivers absolute gains over baselines of 12.6\% on the $\pi_0$ backbone and 10.4\% on the OpenVLA backbone across all 17 perturbations, achieving 50.6x faster inference than existing visual-robust BYOVLA that requires external LLMs, and a 10.4\% gain under mixed perturbations. On the real-world FR5 robot, under four types of multimodal perturbations, RobustVLA shows strong low-data performance, outperforming $\pi_0$ by $65.6\%$ success rate with 25 demonstrations. Even with abundant demos, our method still outperform $\pi_0$ by 30\% success rate. Code and demo videos available at https://github.com/gakakulicc/RobustVLA.
Video
Chat is not available.
Successful Page Load