Interleave-VLA: Enhancing Robot Manipulation with Image-Text Interleaved Instructions
{kind=link}
Abstract
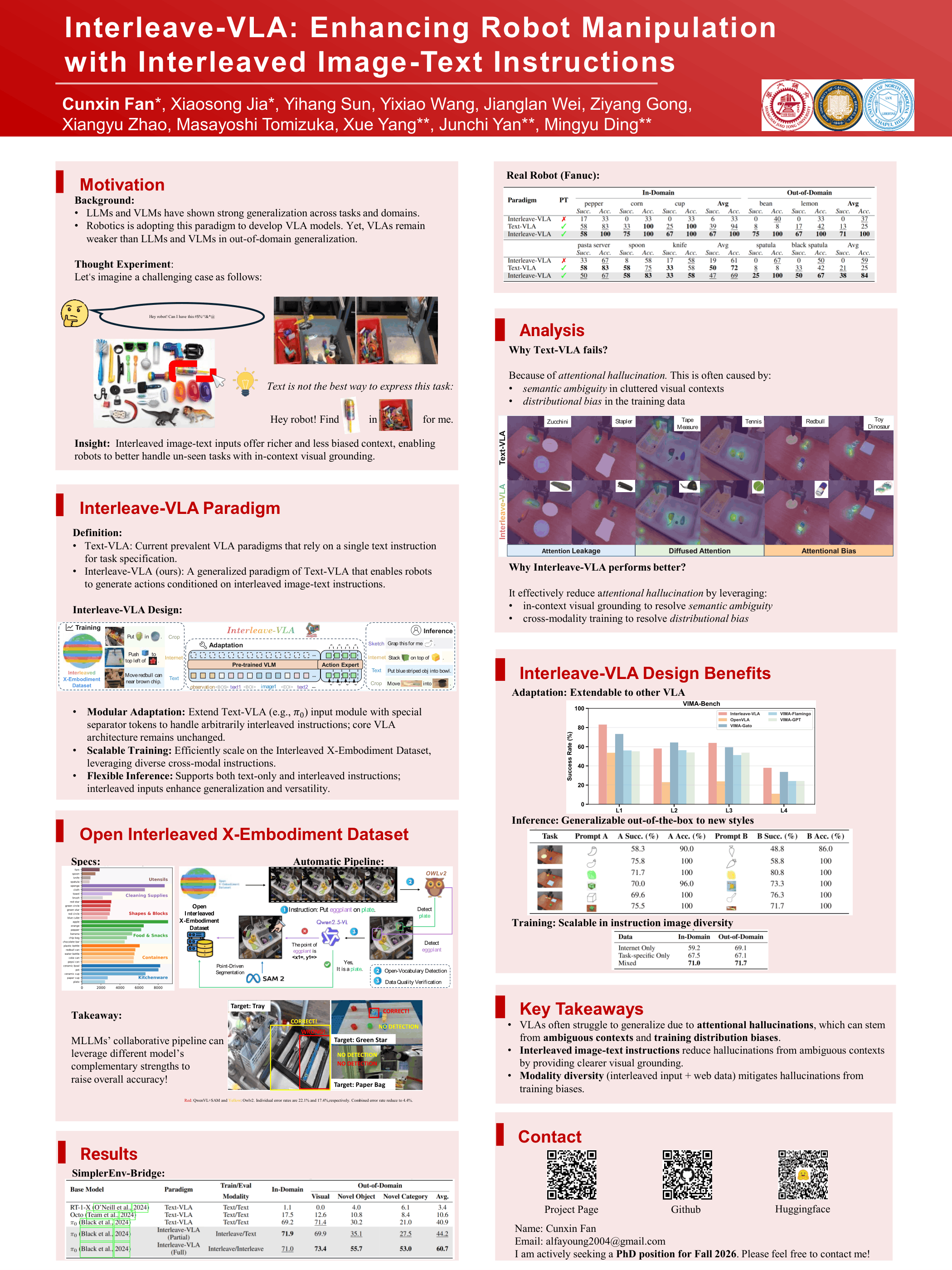
The rise of foundation models paves the way for generalist robot policies in the physical world. Existing methods relying on text-only instructions often struggle to generalize to unseen scenarios. We argue that interleaved image-text inputs offer richer and less biased context and enable robots to better handle unseen tasks with more versatile human-robot interaction. Building on this insight, we introduce Interleave-VLA, a robot learning paradigm extending interleaved image-text instructions from digital world to directly generating continuous action sequences in the physical world. Interleave-VLA offers a natural, flexible, and model-agnostic paradigm that extends state-of-the-art vision-language-action (VLA) models with minimal modifications while achieving strong zero-shot generalization. Interleave-VLA also includes an automatic pipeline that converts text instructions from Open X-Embodiment into interleaved image-text instructions, resulting in a large-scale real-world interleaved embodied dataset with 210k episodes. Comprehensive evaluation in simulation and the real world shows that Interleave-VLA offers two major benefits: (1) improves out-of-domain generalization to unseen objects by 2× compared to text input baselines, (2) supports flexible task interfaces and diverse instructions in a zero-shot manner, such as hand-drawn sketches. We attribute Interleave-VLA's strong zero-shot capability to the use of instruction images, which effectively mitigate hallucinations, and the inclusion of heterogeneous multimodal datasets, enriched with Internet-sourced images, offering potential for scalability. Our project site has more information.