Safe Continuous-time Multi-Agent Reinforcement Learning via Epigraph Form
{kind=link}
Abstract
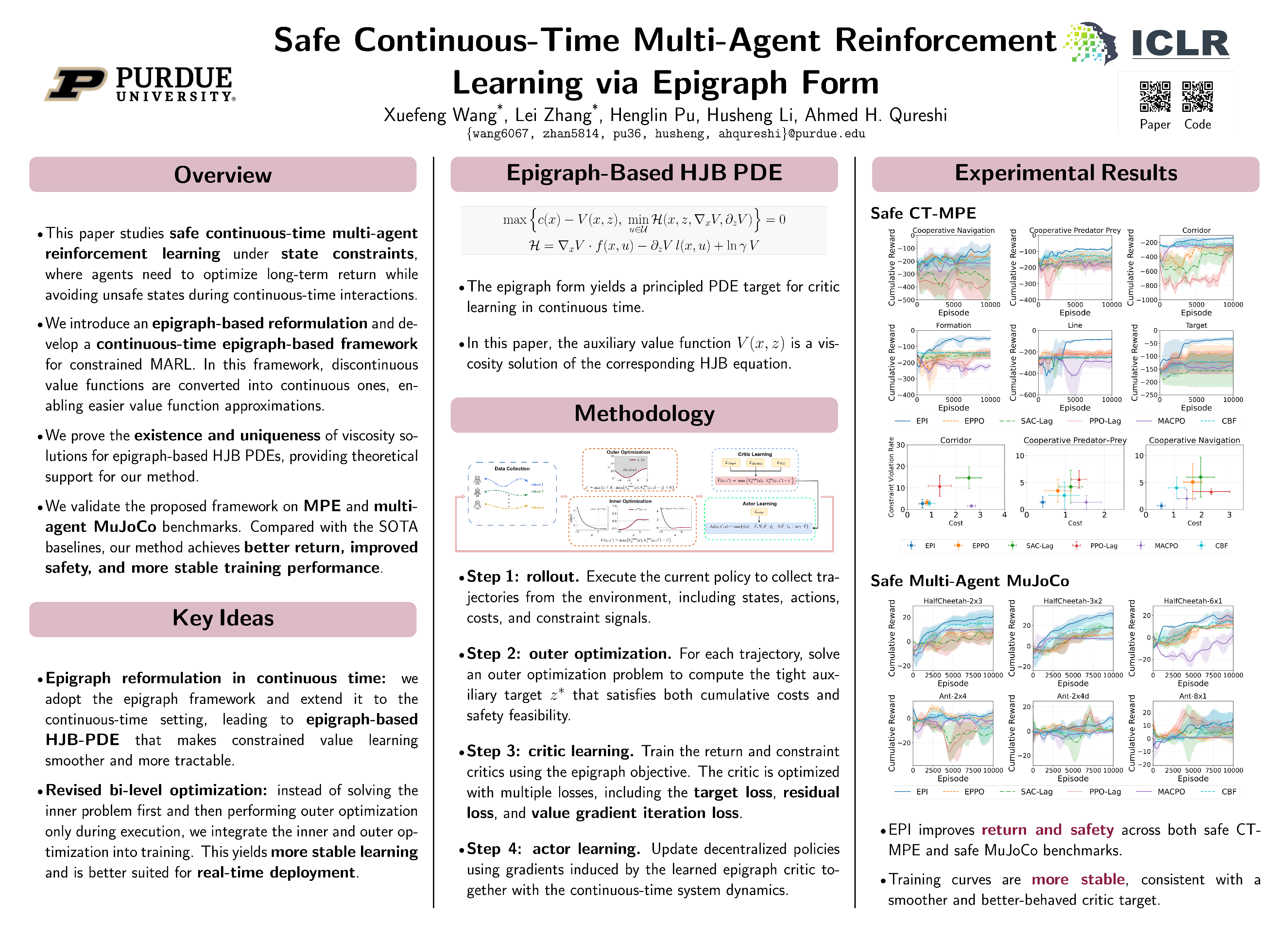
Multi-agent reinforcement learning (MARL) has made significant progress in recent years, but most algorithms still rely on a discrete-time Markov Decision Process (MDP) with fixed decision intervals. This formulation is often ill-suited for complex multi-agent dynamics, particularly in high-frequency or irregular time-interval settings, leading to degraded performance and motivating the development of continuous-time MARL (CT-MARL). Existing CT-MARL methods are mainly built on Hamilton–Jacobi–Bellman (HJB) equations. However, they rarely account for safety constraints such as collision penalties, since these introduce discontinuities that make HJB-based learning difficult. To address this challenge, we propose a continuous-time constrained MDP (CT-CMDP) formulation and a novel MARL framework that transforms discrete MDPs into CT-CMDPs via an epigraph-based reformulation. We then solve this by proposing a novel physics-informed neural network (PINN)-based actor–critic method that enables stable and efficient optimization in continuous time. We evaluate our approach on continuous-time safe multi-particle environments (MPE) and safe multi-agent MuJoCo benchmarks. Results demonstrate smoother value approximations, more stable training, and improved performance over safe MARL baselines, validating the effectiveness and robustness of our method. Code is available at https://github.com/Wangxuefeng1024/Safe-Continuous-time-Multi-Agent-Reinforcement-Learning-via-Epigraph-Form.