Beyond Visual Reconstruction Quality: Object Perception-aware 3D Gaussian Splatting for Autonomous Driving
{kind=link}
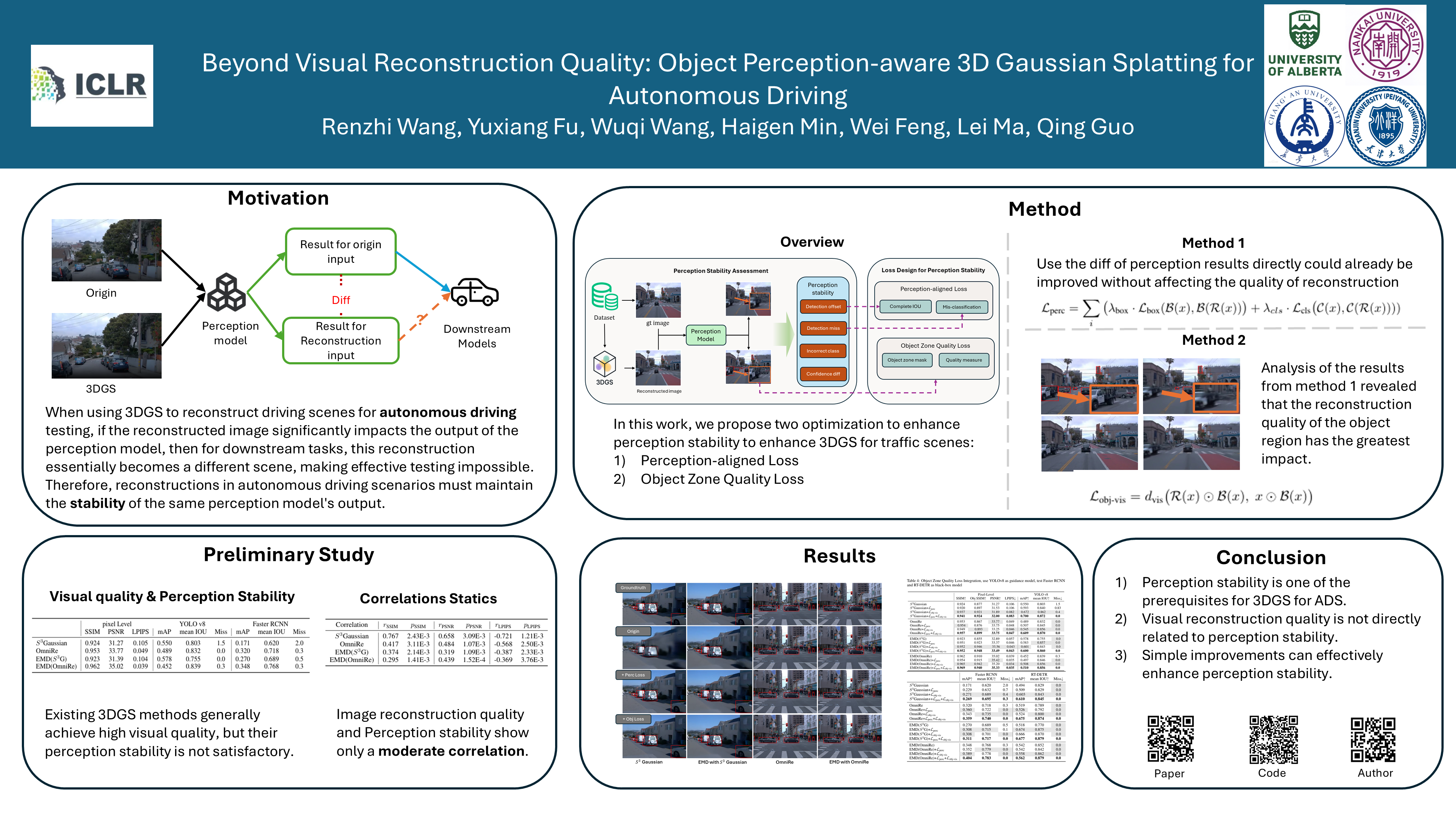
Abstract
Reconstruction techniques, such as 3D Gaussian Splatting (3DGS), are increasingly used to generate scenarios for autonomous driving system (ADS) research. Existing 3DGS-based approaches for autonomous-driving scenario generation have, through various optimizations, achieved high visual similarity in reconstructed scenes. However, this route is built on a strong assumption: that higher scene similarity directly translates into better preservation of ADS behaviour. Unfortunately, this assumption has not been effectively validated, and ADS behaviour is more closely related to objects within the field of view rather than the global image. Thus, we focus on the perception module—the entry point of ADS. Preliminary experiments reveal that although current methods can produce reconstructions with high overall similarity, they often fail to ensure that the perception module outputs remain consistent with those obtained from the original images. Such a limitation can significantly harm the applicability of reconstruction in the ADS domain. To address this gap, we propose two complementary solutions: a perception-aligned loss, which directly leverages output differences between reconstructed and ground-truth images during training; and an object zone quality loss, which specifically reinforces training on object locations identified by the perception model on ground-truth images. Experiments demonstrate that both of our methods improve the ability of reconstructed scenes to maintain consistency between the perception module outputs and the ground-truth inputs. We release code at: https://github.com/Shanicky-RenzhiWang/Perception-aware-3DGS