Self-Guided Low Light Object Detection Framework
{kind=link}
Abstract
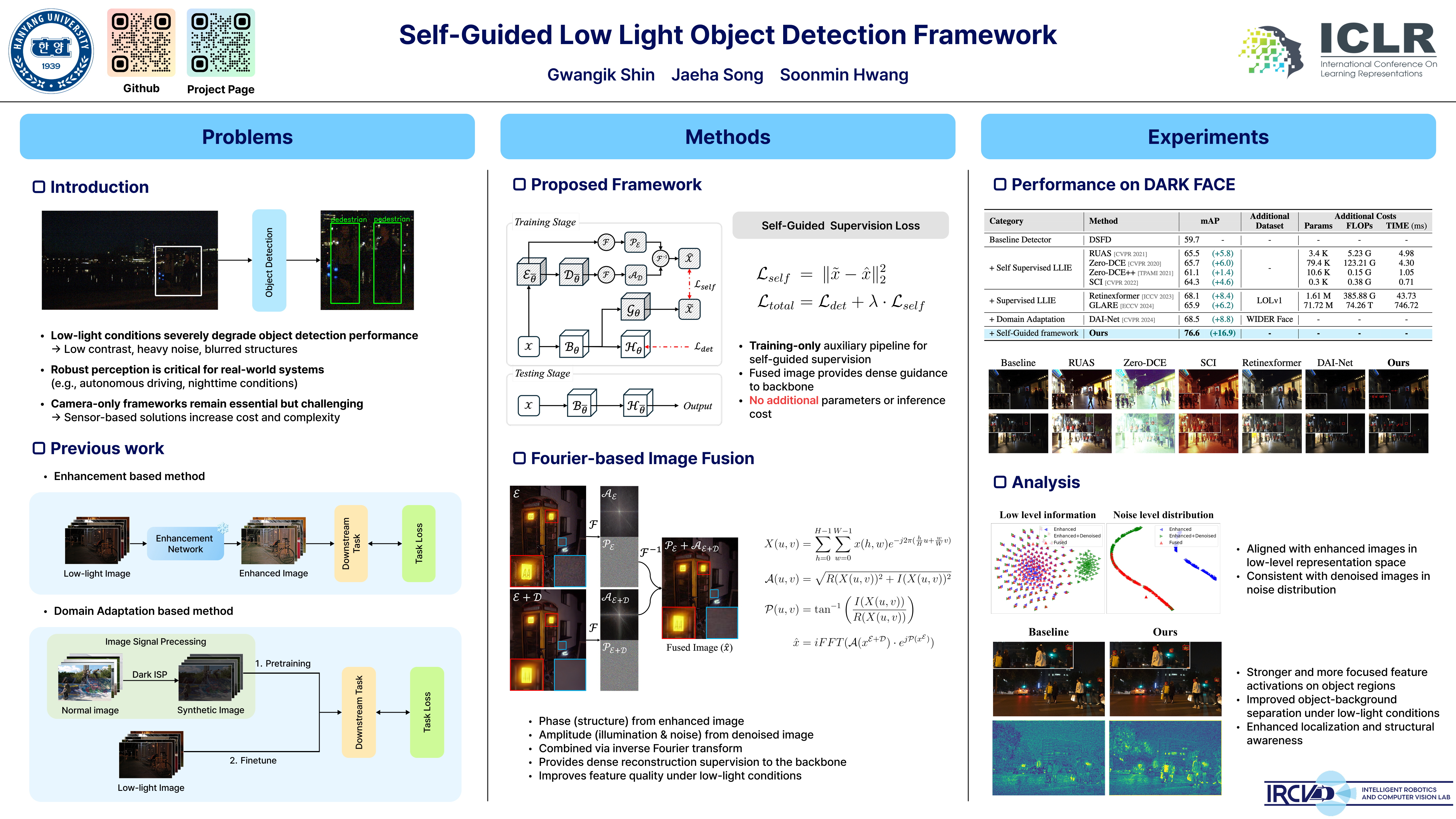
Object detection in low-light environments is inherently challenging due to limited contrast and heavy noise, both of which significantly degrade feature representations. In this paper, we propose a novel self-guided low-light object detection framework that effectively addresses these issues without introducing additional parameters or increasing inference time. Our method incorporates a detachable auxiliary pipeline during training, consisting of an image enhancement module and a denoising module, followed by a Fourier-domain fusion block. This pipeline improves the feature representation of the detector's backbone, enhancing its robustness under low-light conditions. Importantly, at inference time, our method incurs no additional computational cost compared to the baseline detector while achieving substantial performance improvements. Extensive experiments on widely used low-light object detection benchmarks, such as DARK FACE and ExDark, demonstrate that our method achieves state-of-the-art performance. Notably, experiments on the nuImages dataset show that our approach can outperform domain adaptation methods—especially when a large domain gap between source and target domains is inevitable in the real-world applications—highlighting its practical effectiveness. Code is available at https://github.com/gw-shin/SGLDet.