ReCogDrive: A Reinforced Cognitive Framework for End-to-End Autonomous Driving
{kind=link}
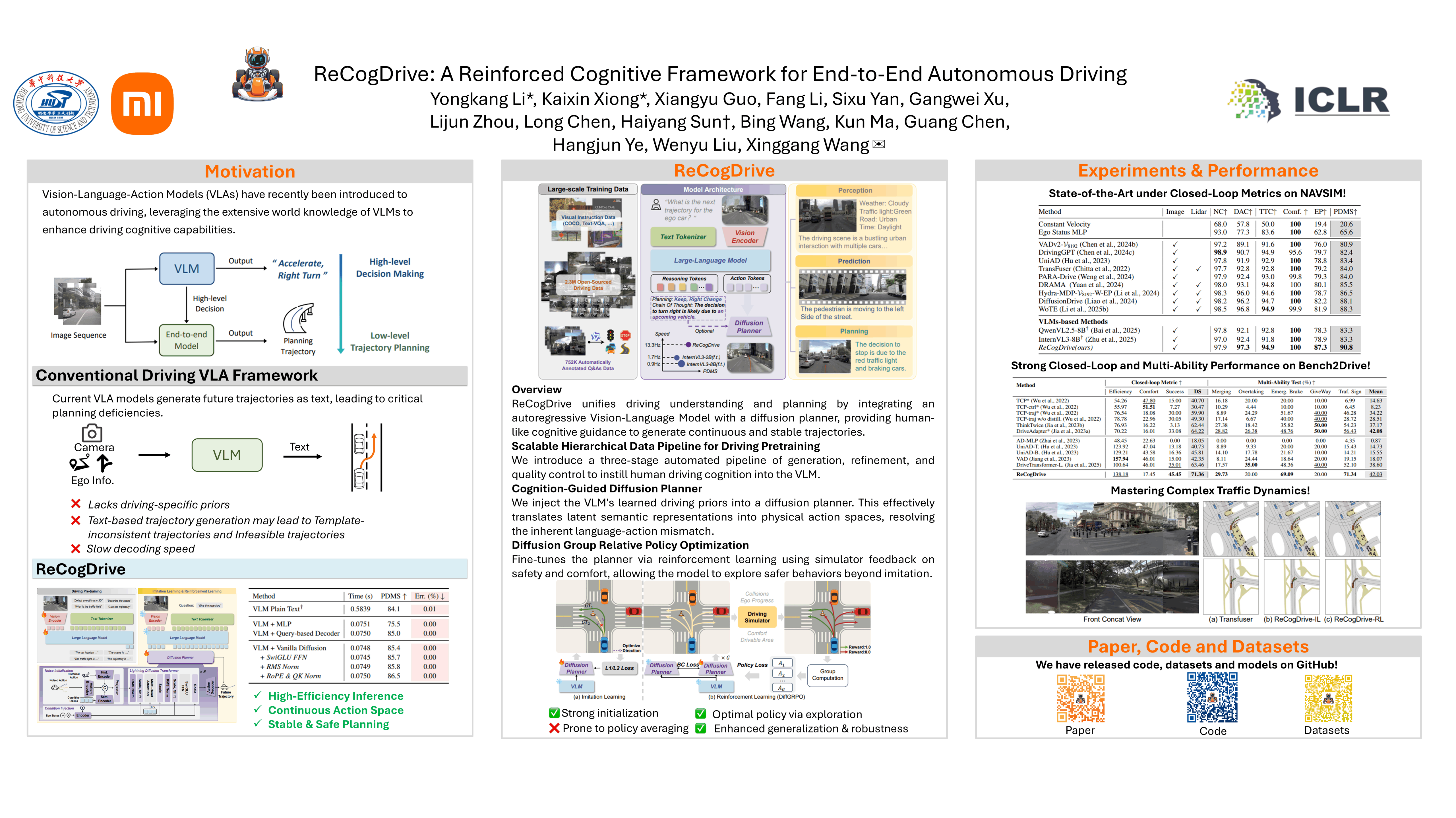
Abstract
Recent studies have explored leveraging the world knowledge and cognitive capabilities of Vision-Language Models (VLMs) to address the long-tail problem in end-to-end autonomous driving. However, existing methods typically formulate trajectory planning as a language modeling task, where physical actions are output in the language space, potentially leading to issues such as format-violating outputs, infeasible actions, and slow inference speeds. In this paper, we propose ReCogDrive, a novel Reinforced Cognitive framework for end-to-end autonomous Driving, unifying driving understanding and planning by integrating an autoregressive model with a diffusion planner. First, to instill human driving cognition into the VLM, we introduce a hierarchical data pipeline that mimics the sequential cognitive process of human drivers through three stages: generation, refinement, and quality control. Building on this cognitive foundation, we then address the language-action mismatch by injecting the VLM's learned driving priors into a diffusion planner to efficiently generate continuous and stable trajectories. Furthermore, to enhance driving safety and reduce collisions, we introduce a Diffusion Group Relative Policy Optimization (DiffGRPO) stage, reinforcing the planner for enhanced safety and comfort. Extensive experiments on the NAVSIM and Bench2Drive benchmarks demonstrate that ReCogDrive achieves state-of-the-art performance. Additionally, qualitative results across diverse driving scenarios and DriveBench highlight the model's scene comprehension.