HUMOF: Human Motion Forecasting in Interactive Social Scenes
{kind=link}
Abstract
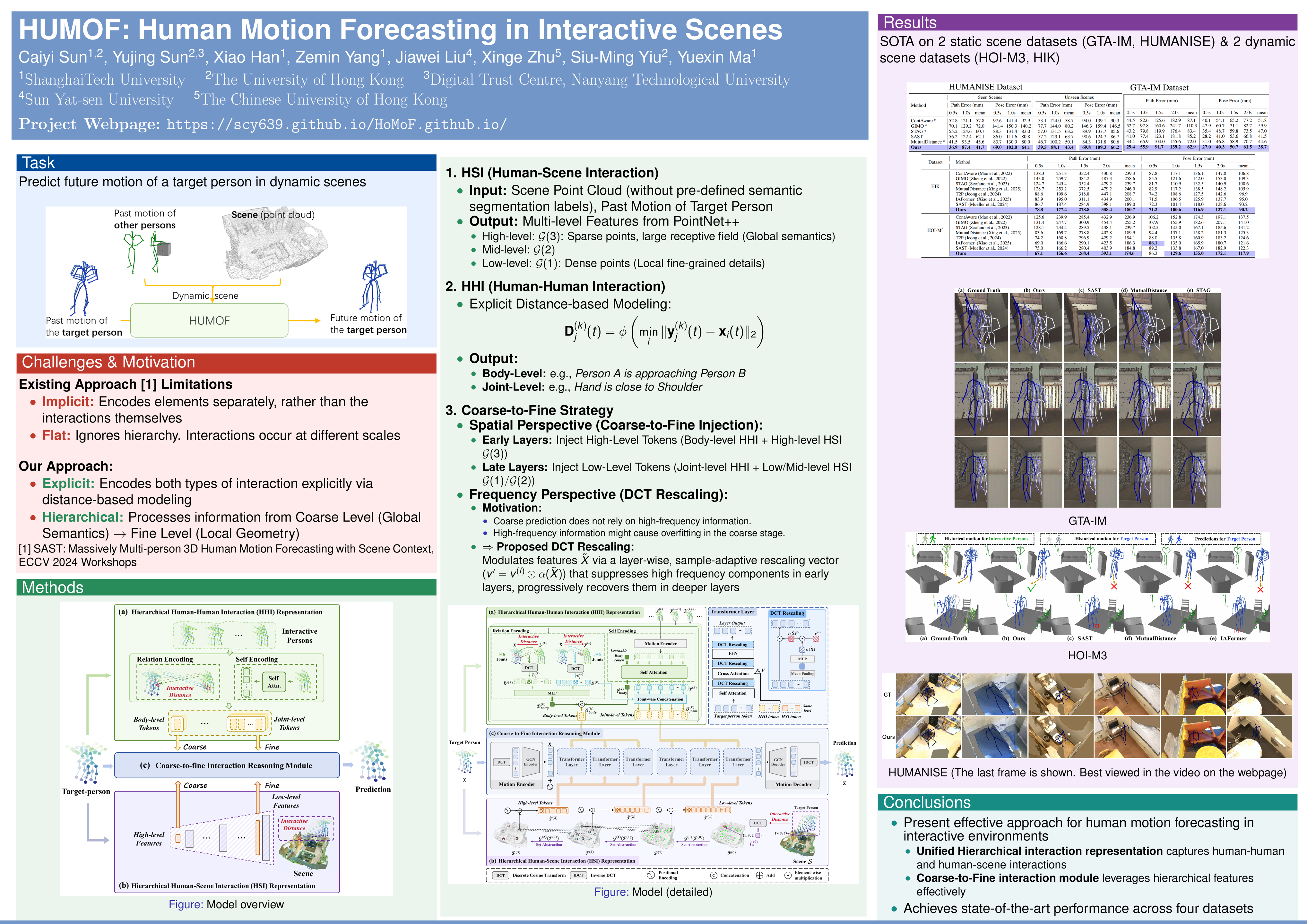
Complex dynamic scenes present significant challenges for predicting human behavior due to the abundance of interaction information, such as human-human and human-environment interactions. These factors complicate the analysis and understanding of human behavior, thereby increasing the uncertainty in forecasting human motions. Existing motion prediction methods thus struggle in these complex scenarios. In this paper, we propose an effective method for human motion forecasting in dynamic scenes. To achieve a comprehensive representation of interactions, we design a hierarchical interaction feature representation so that high-level features capture the overall context of the interactions, while low-level features focus on fine-grained details. Besides, we propose a coarse-to-fine interaction reasoning module that leverages both spatial and frequency perspectives to efficiently utilize hierarchical features, thereby enhancing the accuracy of motion predictions. Our method achieves state-of-the-art performance across four public datasets. The source code will be available at https://github.com/scy639/HUMOF.