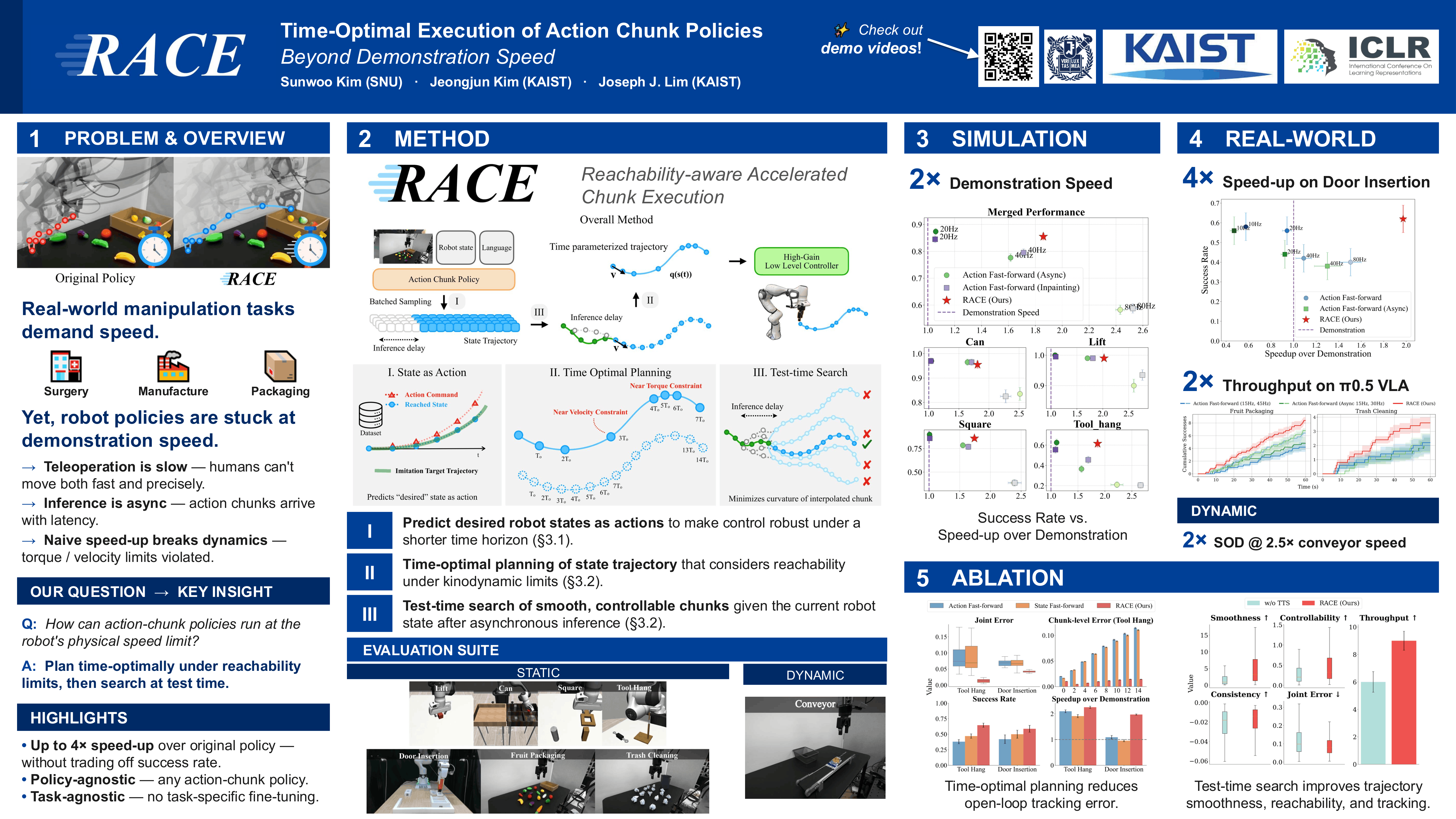
Time Optimal Execution of Action Chunk Policies Beyond Demonstration Speed
Sunwoo Kim ⋅ Jeongjun Kim ⋅ Joseph Lim
{kind=link}
Abstract
Achieving both speed and accuracy is a central challenge for real-world robot manipulation. While recent imitation learning approaches, including vision-language-action (VLA) models, have achieved remarkable precision and generalization, their execution speed is often limited by slow demonstration via teleoperation and by inference latency. In this work, we introduce a method to accelerate any imitation policy that predicts action chunks, enabling speeds that surpass those of the original demonstration. A naive approach of simply increasing the execution frequency of predicted actions leads to significant state errors and task failure, as it alters the underlying transition dynamics and encounters physical reachability constraints over shorter time horizons. These errors are further amplified by misaligned actions based on outdated robot state when using asynchronous inference to accelerate execution. Our method $\textbf{\textit{RACE}}$ address these challenges with a three-part solution: 1) using desired states as imitation targets instead of commanded actions, 2) replanning the timing of action chunks to execute them as fast as the robot's physical limits allow, and 3) employing a test-time search for an aligned action chunk that maximizes controllability from the current state. Through extensive experiments in both simulation and the real world, we show that our method achieves up to a 4x acceleration over the original policy while maintaining a high success rate
Video
Chat is not available.
Successful Page Load