Open-Set Semantic Gaussian Splatting SLAM with Expandable Representation
{kind=link}
Abstract
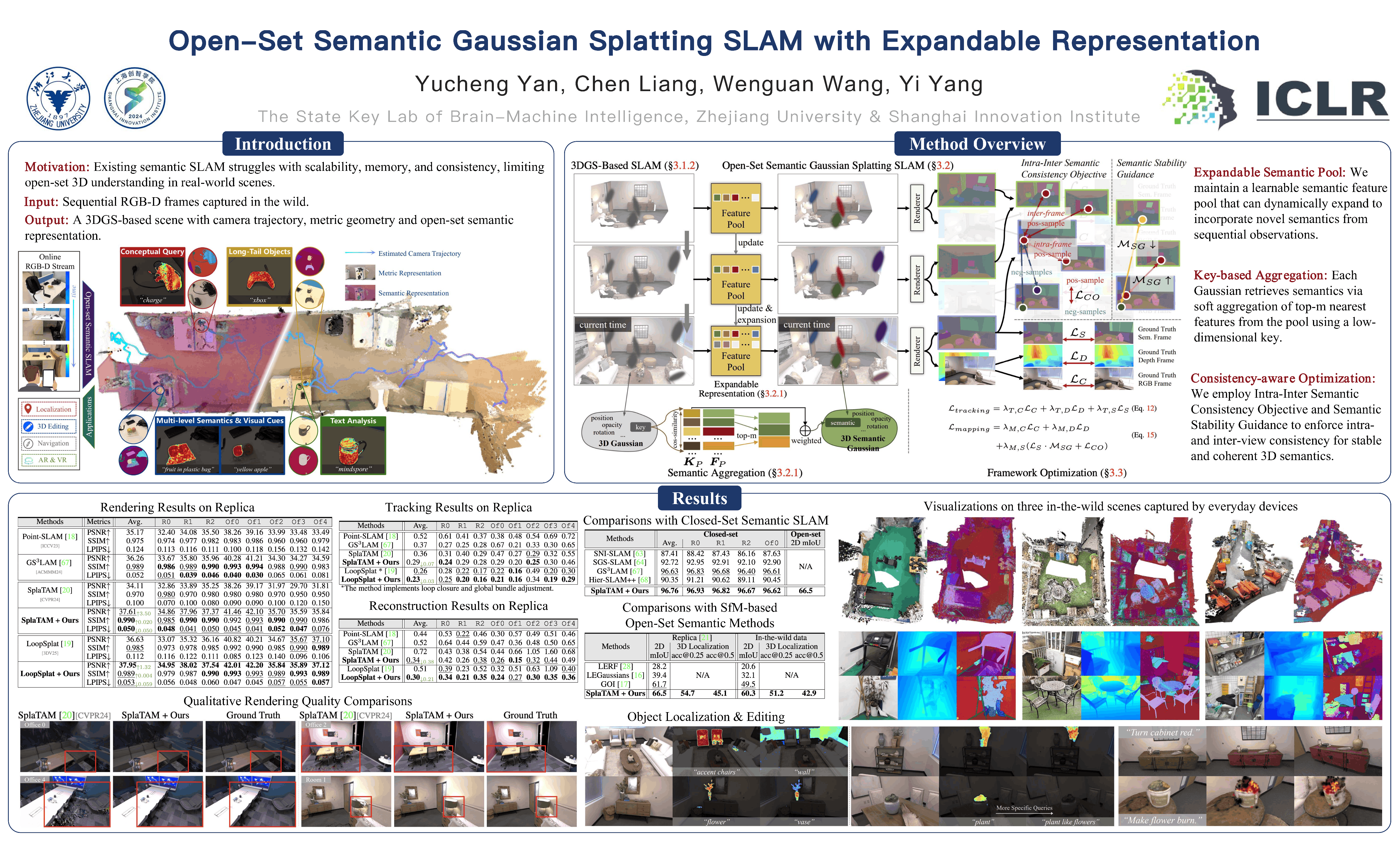
This work enables everyday devices, e.g., smartphones, to dynamically capture open-ended 3D scenes with rich, expandable semantics for immersive virtual worlds. While 3DGS and foundation models hold promise for semantic scene understanding, existing solutions suffer from unscalable semantic integration, prohibitive memory costs, and cross-view inconsistency. To respond, we propose Open-Set Semantic Gaussian Splatting SLAM, a GS-SLAM system augmented by an expandable semantic feature pool that decouples condensed scene-level semantics from individual 3D Gaussians. Each Gaussian references semantics via a lightweight indexing vector, reducing memory overhead by orders of magnitude while supporting dynamic updates. Besides, we introduce a consistency-aware optimization strategy alongside a Semantic Stability Guidance mechanism to enhance long-term, cross-view semantic consistency and resolve inconsistencies. Experiments demonstrate that our system achieves high-fidelity rendering with scalable, open-set semantics across both controlled and in-the-wild environments, supporting applications like 3D localization and scene editing. These results mark an initial yet solid step towards high-quality, expressive, and accessible 3D virtual world modeling. Our code will be publicly released.