PointRePar : SpatioTemporal Point Relation Parsing for Robust Category-Unified 3D Tracking
{kind=link}
Abstract
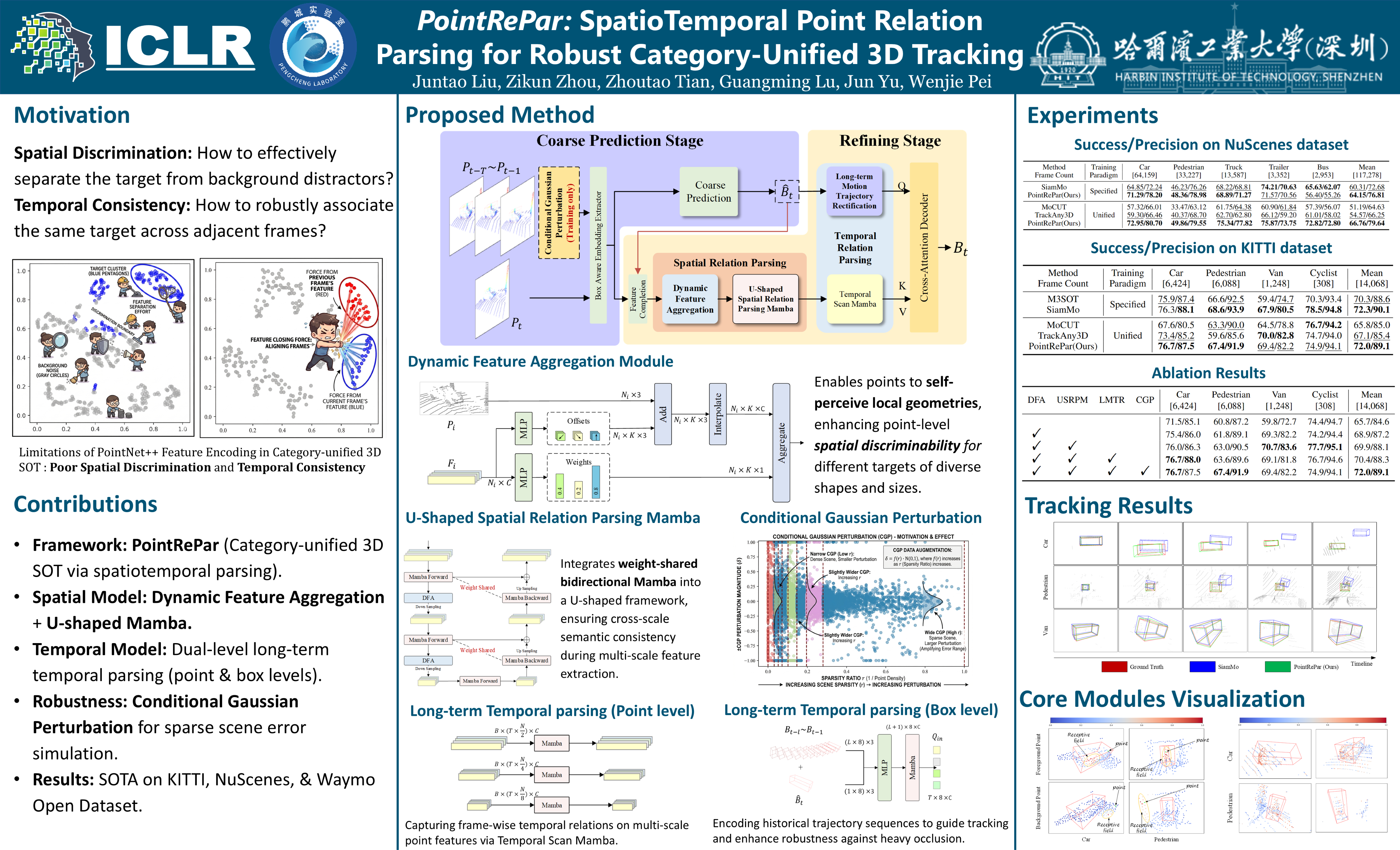
3D single object tracking (SOT) remains a highly challenging task due to the inherent crux in learning representations from point clouds to effectively capture both spatial shape features and temporal motion features. Most existing methods employ a category-specific optimization paradigm, training the tracking model individually for each object category to enhance tracking performance, albeit at the expense of generalizability across different categories. In this work, we propose a robust category-unified 3D SOT model, referred to as SpatioTemporal Point Relation Parsing model (PointRePar), which is capable of joint training across multiple categories while excelling in unified feature learning for both spatial shapes and temporal motions. Specifically, the proposed PointRePar captures and parses the latent point relations across both spatial and temporal domains to learn superior shape and motion characteristics for robust tracking. On the one hand, it models the multi-scale spatial point relations using a Mamba-based U-Net architecture with adaptive point-wise feature refinement. On the other hand, it captures both the point-level and box-level temporal relations to exploit the latent motion features. Extensive experiments across three benchmarks demonstrate that our PointRePar not only outperforms the existing category-unified 3D SOT methods significantly, but also compares favorably against the state-of-the-art category-specific methods. Codes will be released.