LINK: Learning Instance-level Knowledge from Vision-Language Models for Human-Object Interaction Detection
{kind=link}
Abstract
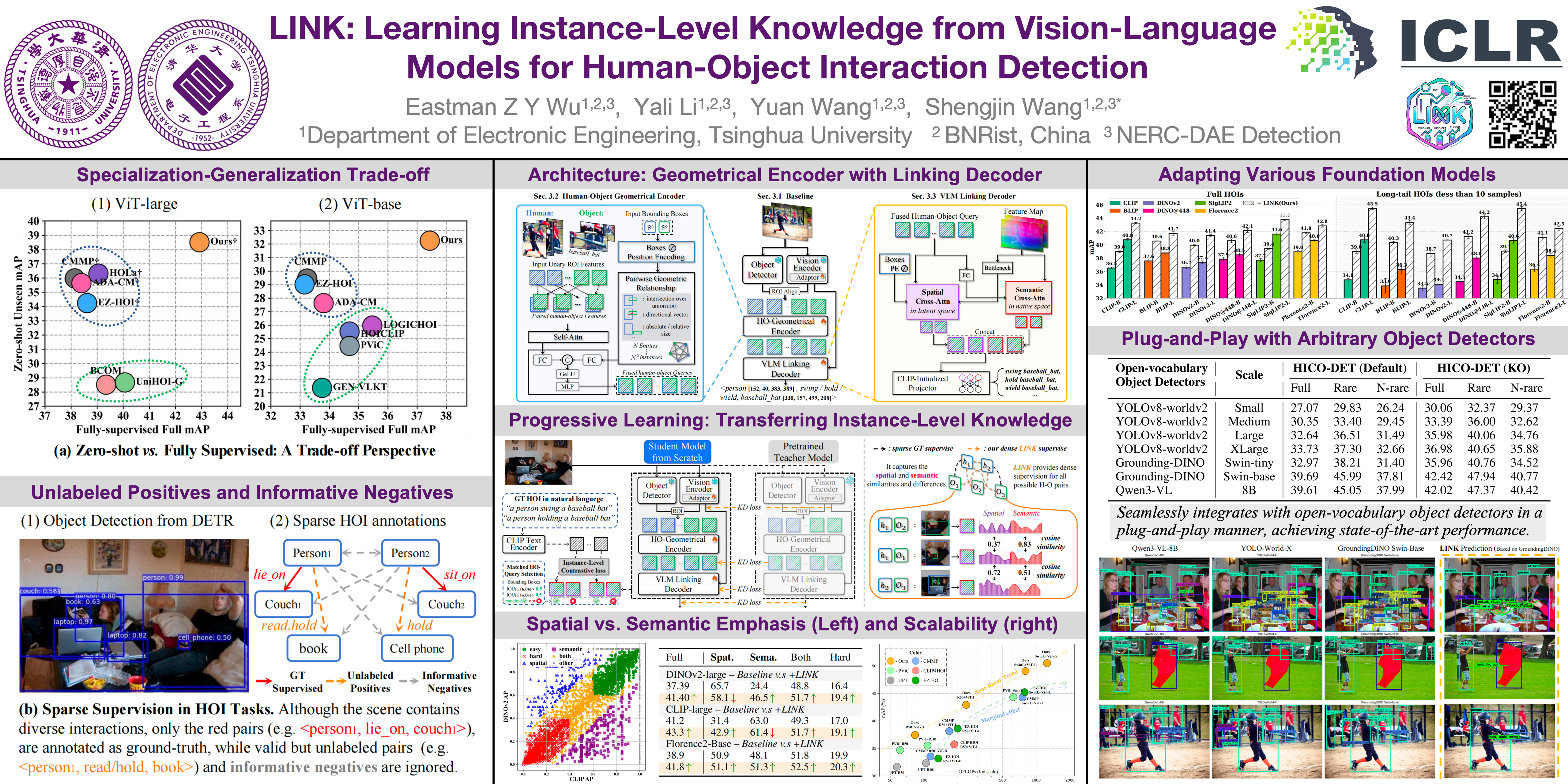
Human-Object Interaction (HOI) detection with vision-language models (VLMs) has progressed rapidly, yet a trade-off persists between specialization and generalization. Two major challenges remain: (1) the sparsity of supervision, which hampers effective transfer of foundation models to HOI tasks, and (2) the absence of a generalizable architecture that can excel in both fully supervised and zero-shot scenarios. To address these issues, we propose \textbf{LINK}, \textbf{L}earning \textbf{IN}stance-level \textbf{K}nowledge from VLMs. First, we introduce a HOI detection framework equipped with a Human-Object Geometrical Encoder and a VLM Linking Decoder. By decoupling from detector-specific features, our design ensures plug-and-play compatibility with arbitrary object detectors and consistent adaptability across diverse settings. Building on this foundation, we develop a Progressive Learning Strategy under a teacher-student paradigm, which delivers dense supervision over all potential human-object pairs. By contrasting subtle spatial and semantic differences between positive and negative instances, the model learns robust and transferable HOI representations. LINK sets new state-of-the-art on SWiG-HOI, HICO-DET, and V-COCO across zero-shot, fully supervised, and open-vocabulary settings, with strong generalization to unseen interaction categories.