Beyond Distributions: Geometric Action Control for Continuous Reinforcement Learning
{kind=link}
Abstract
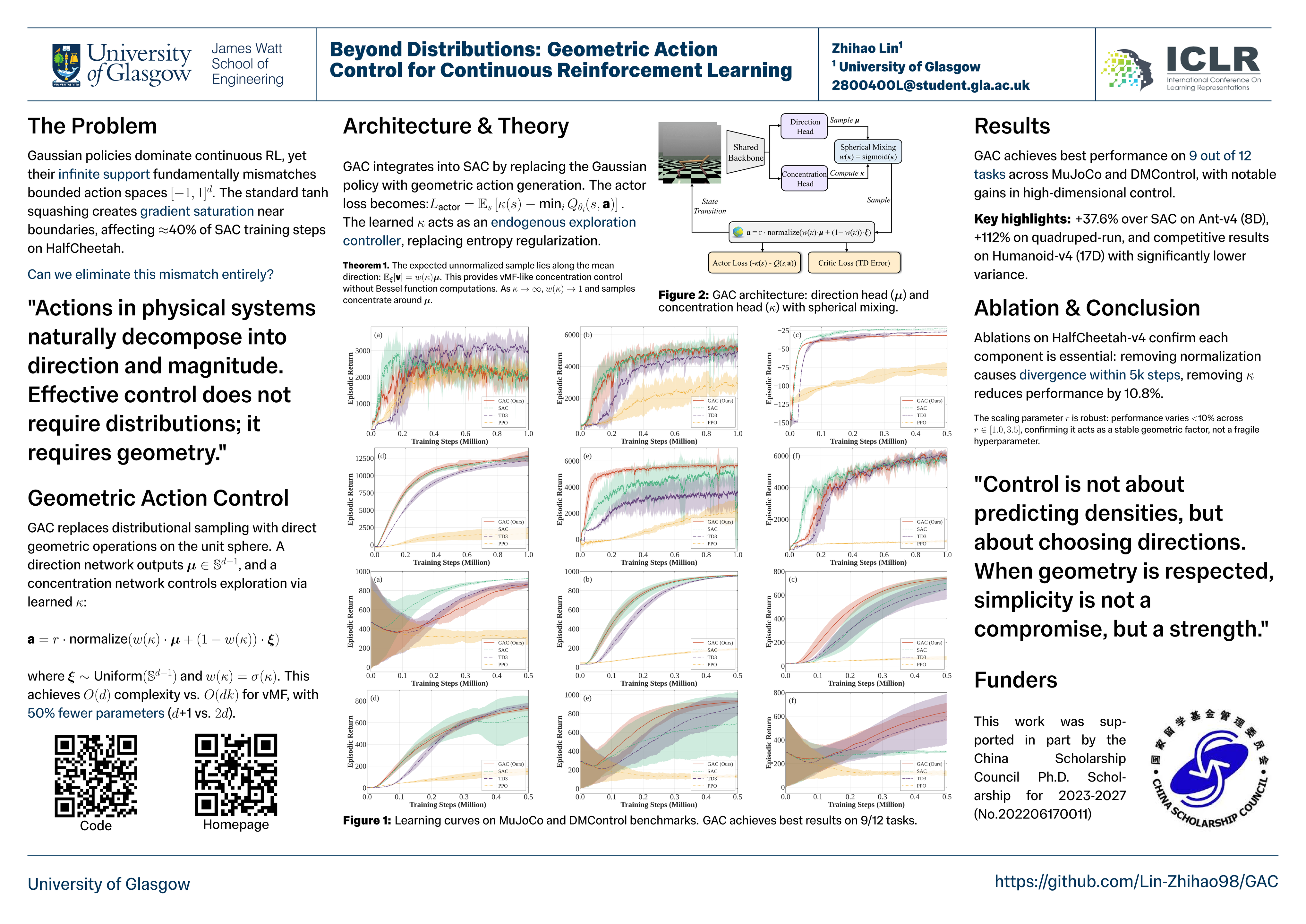
Gaussian policies have dominated continuous control in deep reinforcement learning (RL), yet they suffer from a fundamental mismatch: their unbounded support requires ad-hoc squashing functions that distort the geometry of bounded action spaces. While von Mises-Fisher (vMF) distributions offer a theoretically grounded alternative on the sphere, their reliance on Bessel functions and rejection sampling hinders practical adoption. We propose \textbf{Geometric Action Control (GAC)}, a novel action generation paradigm that preserves the geometric benefits of spherical distributions while \textit{simplifying computation}. GAC decomposes action generation into a direction vector and a learnable concentration parameter, enabling efficient interpolation between deterministic actions and uniform spherical noise. This design reduces parameter count from (2d) to (d+1), and avoids the (O(dk)) complexity of vMF rejection sampling, achieving simple (O(d)) operations. Empirically, GAC consistently matches or exceeds state-of-the-art methods across six MuJoCo benchmarks, achieving 37.6\% improvement over SAC on Ant-v4 and up to 112\% on complex DMControl tasks, demonstrating strong performance across diverse benchmarks. Our ablation studies reveal that both \textbf{spherical normalization} and \textbf{adaptive concentration control} are essential to GAC's success. These findings suggest that robust and efficient continuous control does not require complex distributions, but a principled respect for the geometry of action spaces. Code and pretrained models are available in supplementary materials.