PRISM: Progressive Robust Learning for Open-World Continual Category Discovery
{kind=link}
Abstract
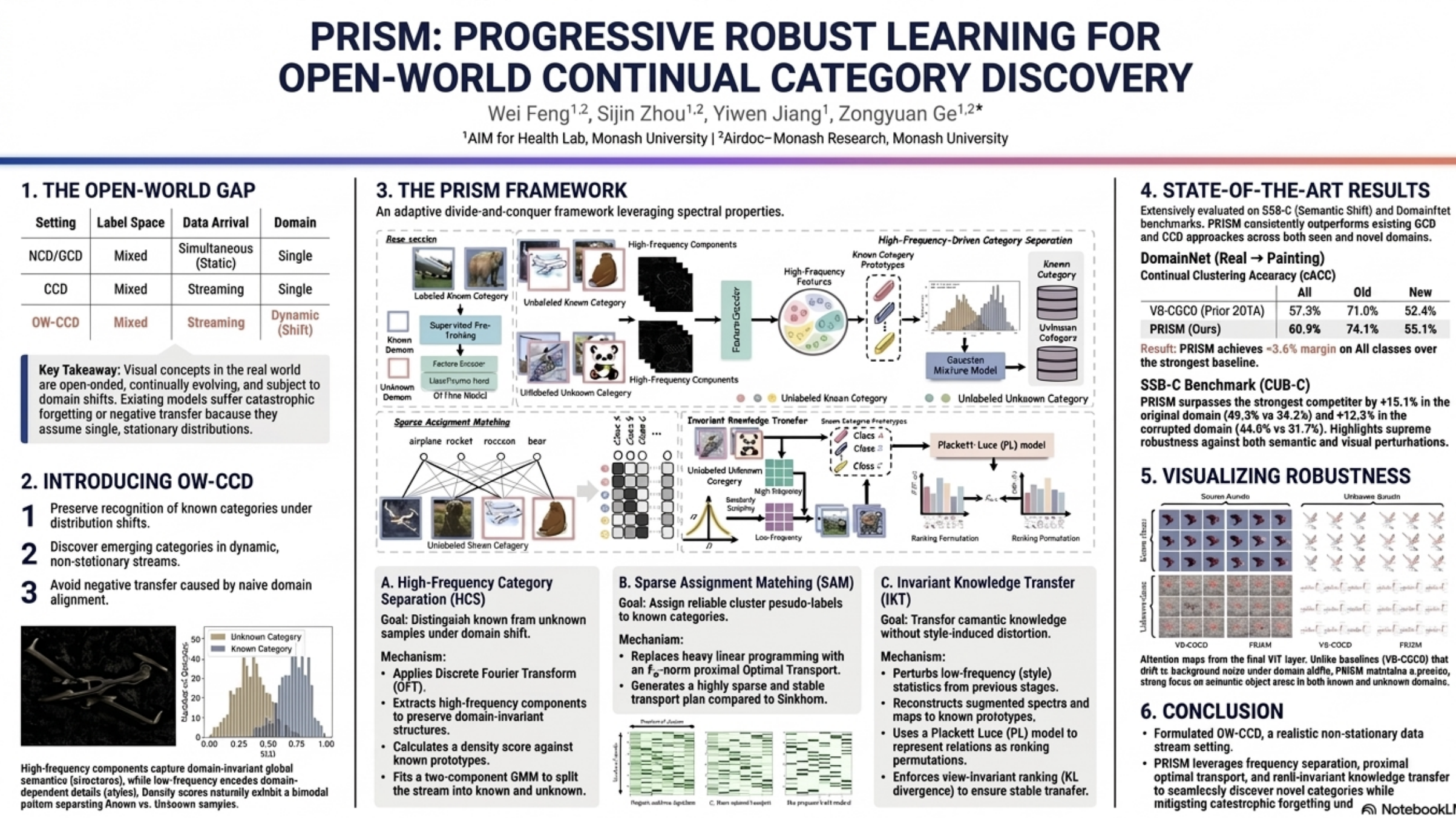
Continual Category Discovery (CCD) aims to leverage models trained on known categories to automatically discover novel category concepts from continuously arriving streams of unlabeled data, while retaining the ability to recognize previously known classes. Despite recent progress, existing methods often assume that data across all stages are drawn from a single, stationary distribution—a condition rarely satisfied in open-world scenarios. In this paper, we challenge this stationary-distribution assumption by introducing the Open-World Continual Category Discovery (OW-CCD) setting. We address this challenge with PRISM (\underline{P}rogressive \underline{R}obust d\underline{I}scovery under \underline{S}trea\underline{M}ing data), an adaptive continual discovery framework consisting of three key components. First, inspired by spectral properties, we develop a high-frequency-driven category separation technique that exploits high-frequency components—preserving more global information—to distinguish known from unknown categories. Second, for known categories, we design a sparse assignment matching strategy, which performs proximal sparse sample-to-label matching to assign reliable cluster labels to known-class samples. Finally, to better recognize novel categories, we propose an invariant knowledge transfer module that enforces domain-invariant category relation consistency, thereby facilitating robust knowledge transfer from known to unknown classes under domain shifts. Extensive experiments on the SSB-C and DomainNet benchmarks demonstrate that our method significantly outperforms state-of-the-art CCD approaches, highlighting its effectiveness and superiority.