ReSplat: Degradation-agnostic Feed-forward Gaussian Splatting via Self-guided Residual Diffusion
{kind=link}
Abstract
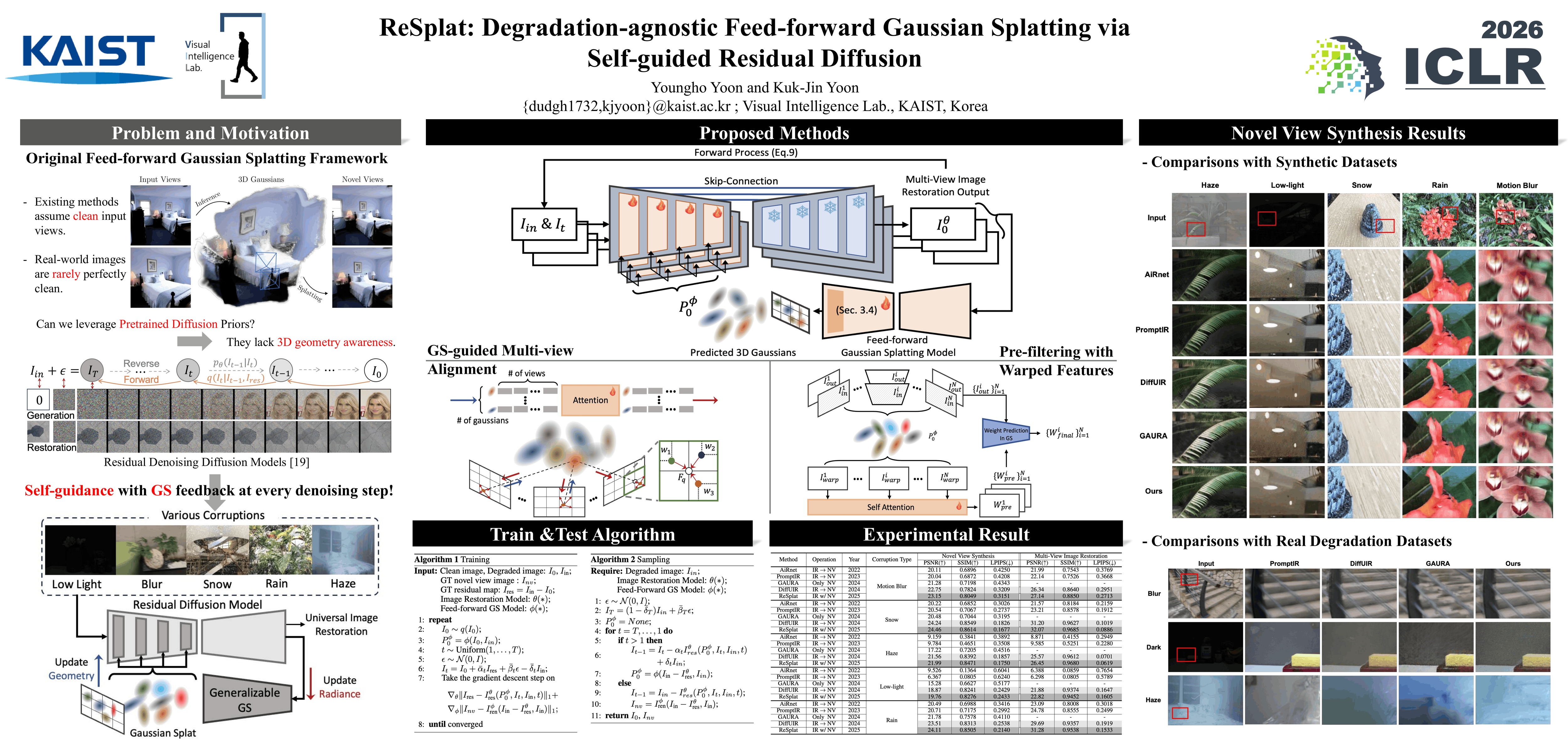
Recent advances in novel view synthesis (NVS) have predominantly focused on ideal, clear input settings, limiting their applicability in real-world environments with common degradations such as blur, low-light, haze, rain, and snow. While some approaches address NVS under specific degradation types, they are often tailored to narrow cases, lacking the generalizability needed for broader scenarios. To address this issue, we propose Restoration-based feed-forward Gaussian Splatting, named ReSplat, a novel framework capable of handling degraded multi-view inputs. Our model jointly estimates restored images and gaussians to represent the clear scene for NVS. We enable multi-view consistent universal image restoration by utilizing the 3d gaussians generated during the diffusion sampling process as self-guidance. This results in sharper and more reliable novel views. Notably, our framework adapts to various degradations without prior knowledge of their specific types. Extensive experiments demonstrate that ReSplat significantly outperforms existing methods across challenging conditions, including blur, low-light, haze, rain, and snow, delivering superior visual quality and robust NVS performance. Code is available at https://github.com/yh-yoon/ReSplat.