Master Skill Learning with Policy-Grounded Synergy of LLM-based Reward Shaping and Exploring
{kind=link}
Abstract
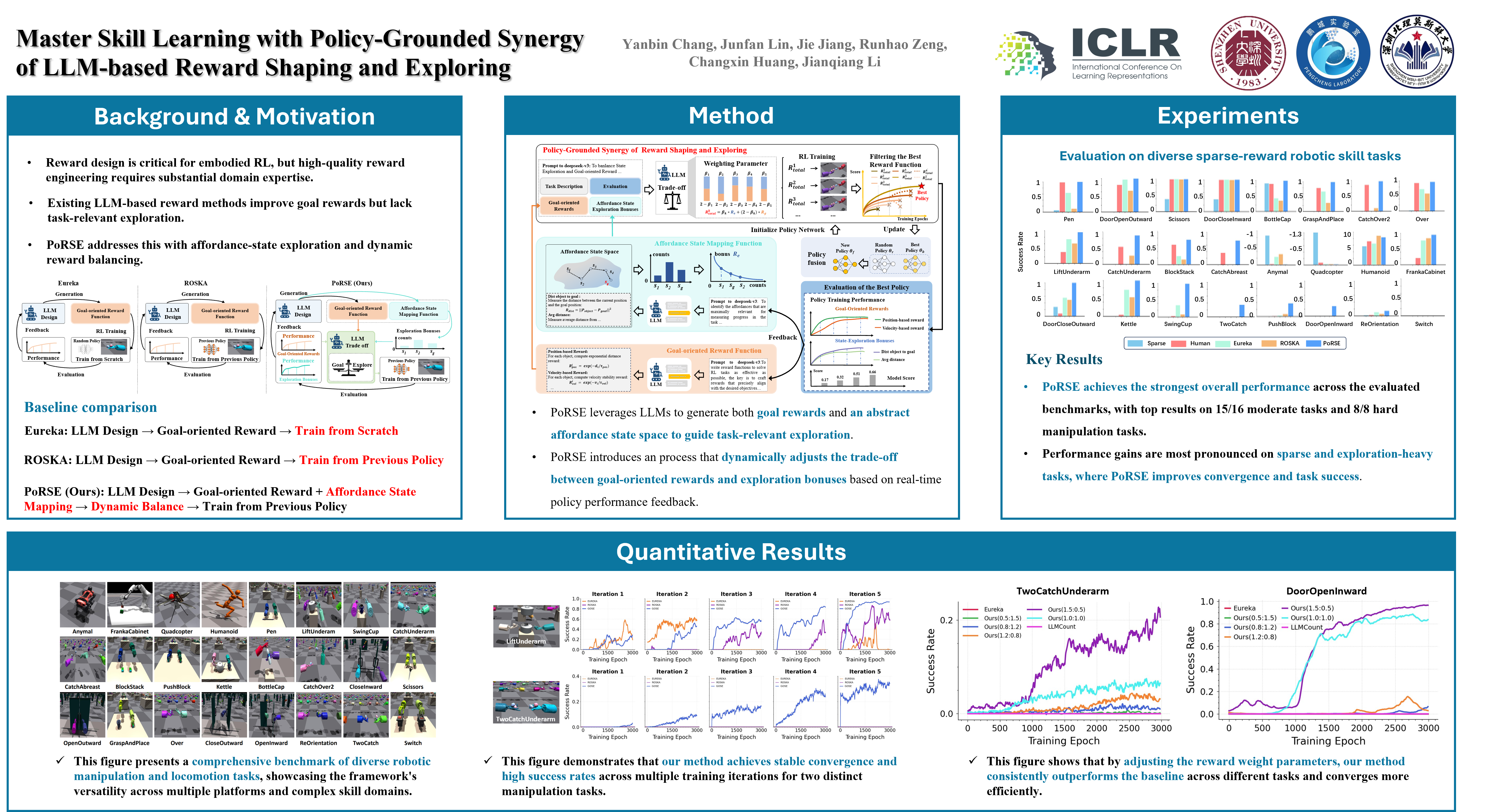
The acquisition of robotic skills via reinforcement learning (RL) is crucial for advancing embodied intelligence, but designing effective reward functions for complex tasks remains challenging. Recent methods using large language models (LLMs) can generate reward functions from language instructions, but they often produce overly goal-oriented rewards that neglect state exploration, causing robots to get stuck in local optima. Traditional RL addresses this by adding exploration bonuses, but these are typically generic and inefficient, wasting resources on exploring task-irrelevant areas. To address these limitations, we propose Policy-grounded Synergy of Reward Shaping and Exploration (PoRSE), a novel and unified framework that guides LLMs to generate task-aware reward functions while constructing an abstract affordance space for efficient exploration bonuses. Given the vast number of possible reward-bonus combinations, it is impractical to exhaustively train a policy from scratch for each configuration to identify the best one. Instead, PoRSE employs an in-policy-improvement grounding process, dynamically and continuously generating and filtering out reward-bonus pairs along the policy improvement process. This approach accelerates skill acquisition and fosters a mutually reinforcing relationship between reward shaping, exploration and policy enhancement through close feedback. Experiments show that PoRSE is highly effective, achieving significant improvement in average returns across all robotic tasks compared to previous state-of-the-art methods. It also achieves initial success in two highly challenging manipulation tasks, marking a significant breakthrough.