TaCo: A Benchmark for Lossless and Lossy Codecs of Heterogeneous Tactile Data
{kind=link}
Abstract
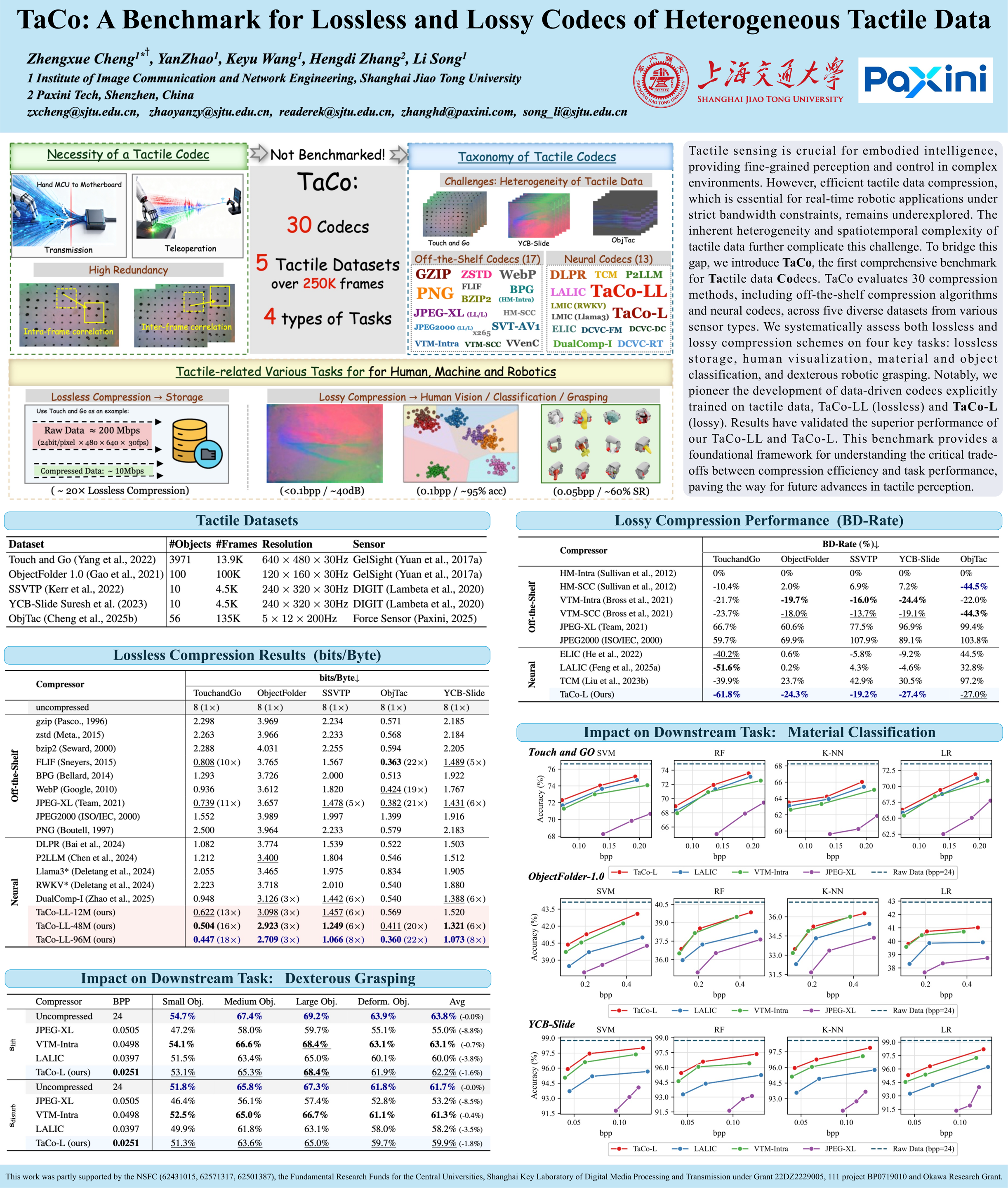
Tactile sensing is crucial for embodied intelligence, providing fine-grained perception and control in complex environments. However, efficient tactile data compression, which is essential for real-time robotic applications under strict bandwidth constraints, remains underexplored. The inherent heterogeneity and spatiotemporal complexity of tactile data further complicate this challenge. To bridge this gap, we introduce TaCo, the first comprehensive benchmark for Tactile data Codecs. TaCo evaluates 30 compression methods, including off-the-shelf compression algorithms and neural codecs, across five diverse datasets from various sensor types. We systematically assess both lossless and lossy compression schemes on four key tasks: lossless storage, human visualization, material and object classification, and dexterous robotic grasping. Notably, we pioneer the development of data-driven codecs explicitly trained on tactile data, TaCo-LL (lossless) and TaCo-L (lossy). Results have validated the superior performance of our TaCo-LL and TaCo-L. This benchmark provides a foundational framework for understanding the critical trade-offs between compression efficiency and task performance, paving the way for future advances in tactile perception.