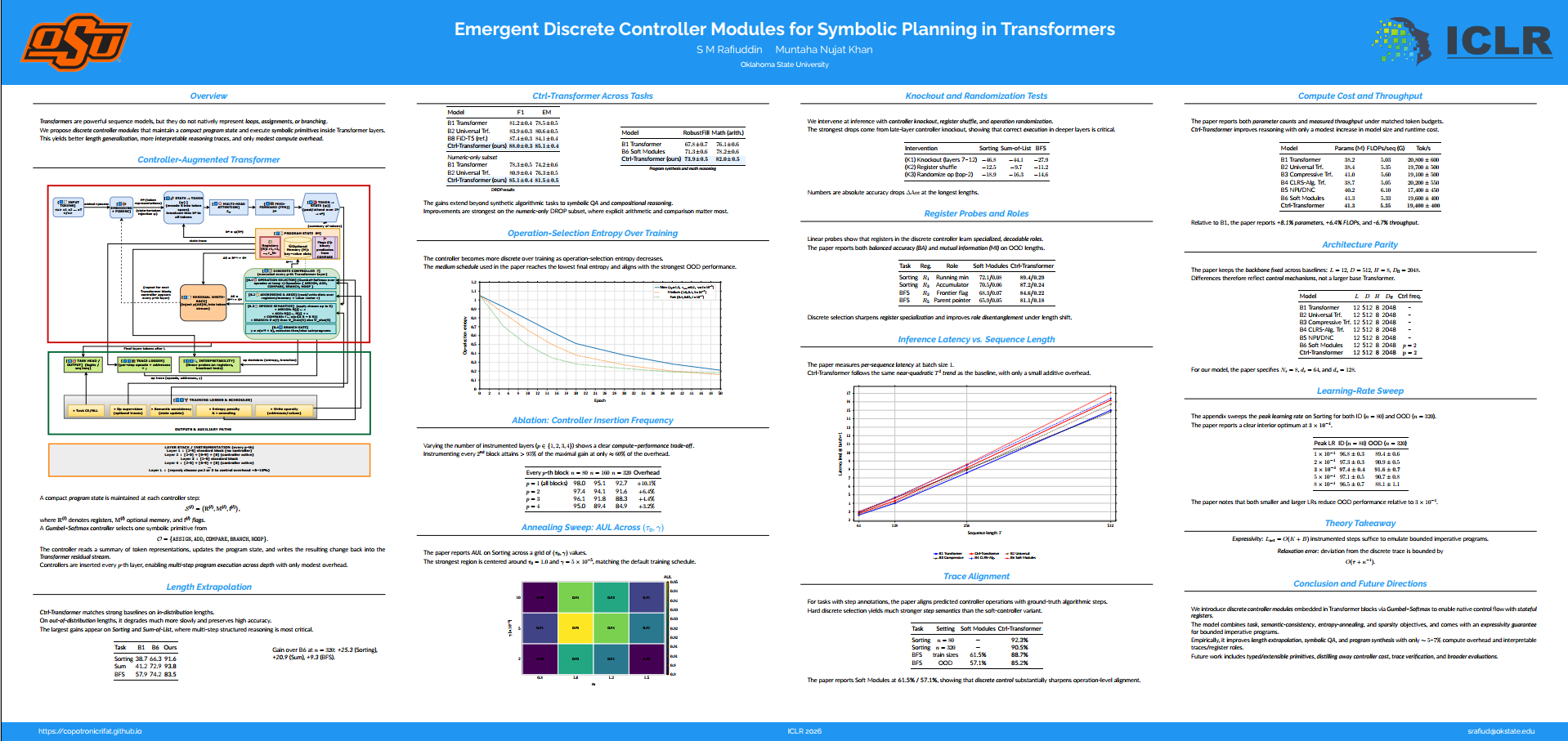
Emergent Discrete Controller Modules for Symbolic Planning in Transformers
S M Rafiuddin ⋅ Muntaha Khan
{kind=link}
Abstract
Transformers struggle with tasks that require symbolic planning loops, variable updates, and conditional branching, especially under length extrapolation. We introduce discrete controller modules that insert a small set of program primitives (ASSIGN, ADD, COMPARE, BRANCH) into Transformer blocks via a Gumbel–Softmax selector over operations and a compact program state of registers, flags, and optional memory. We prove that the augmented model can simulate any bounded-step program by mapping each primitive step to one controller step, and we bound the deviation of relaxed execution from its discrete trace by $O(\tau+\kappa^{-1})$ (selection temperature $\tau$, comparison sharpness $\kappa$). Empirically, the controller-augmented Transformer achieves strong length generalization on algorithmic benchmarks (Sorting, Sum-of-List, BFS), improving longest-length accuracy by up to $20$–$40$ points over strong baselines, and yields consistent gains on symbolic QA (DROP) and program-synthesis-style tasks (RobustFill) with reduced compositionality drop-off. The learned execution is interpretable: operation traces align with ground truth, register roles are linearly decodable, and targeted knockouts cause localized accuracy losses. The approach adds only $\sim$5–7% FLOPs and can be applied sparsely (every $p$-th layer).
Video
Chat is not available.
Successful Page Load