Zeroth-Order Optimization with Trajectory-Informed Derivative Estimation
{kind=link}
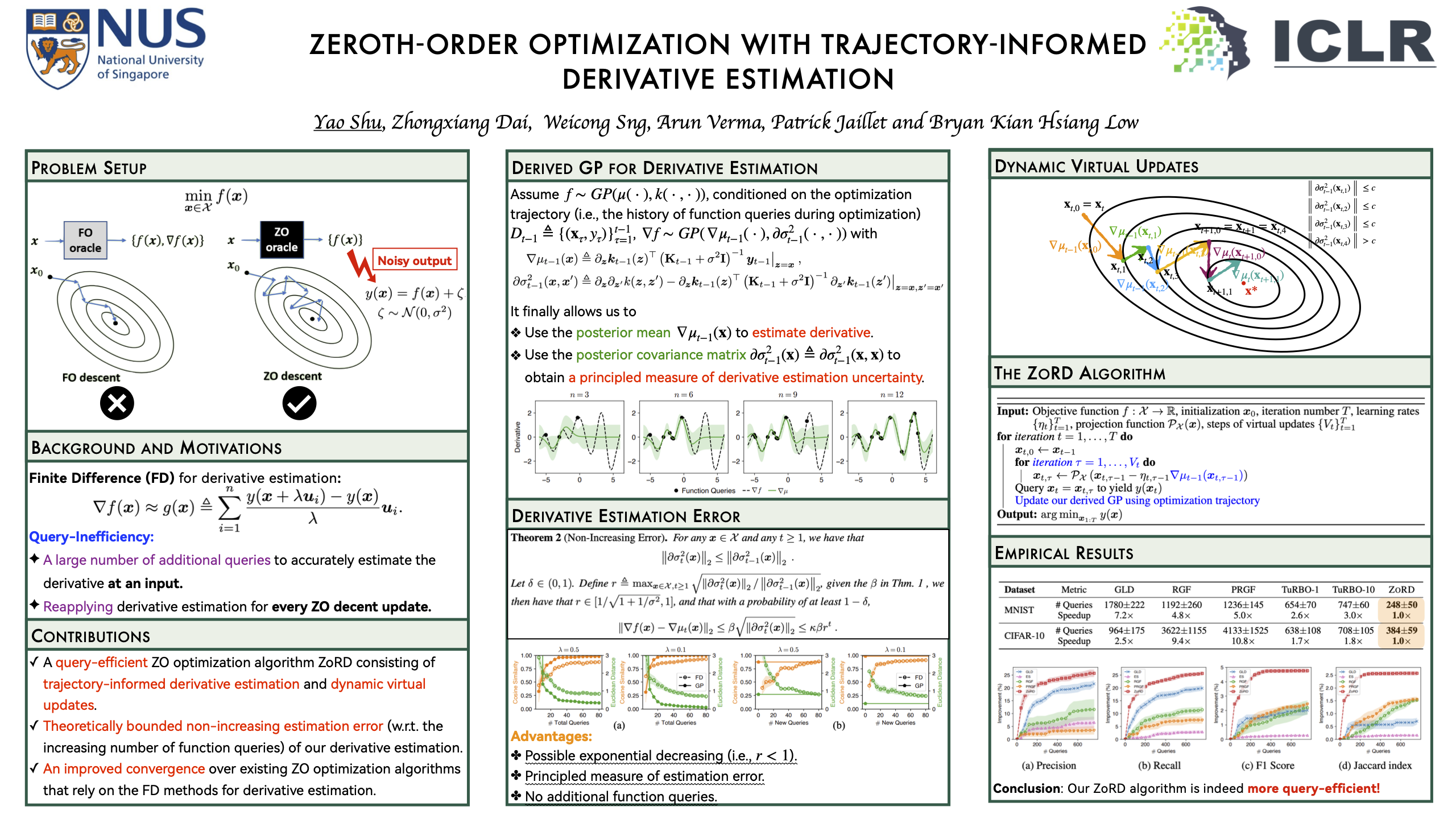
Abstract
Zeroth-order (ZO) optimization, in which the derivative is unavailable, has recently succeeded in many important machine learning applications. Existing algorithms rely on finite difference (FD) methods for derivative estimation and gradient descent (GD)-based approaches for optimization. However, these algorithms suffer from query inefficiency because many additional function queries are required for derivative estimation in their every GD update, which typically hinders their deployment in real-world applications where every function query is expensive. To this end, we propose a trajectory-informed derivative estimation method which only employs the optimization trajectory (i.e., the history of function queries during optimization) and hence can eliminate the need for additional function queries to estimate a derivative. Moreover, based on our derivative estimation, we propose the technique of dynamic virtual updates, which allows us to reliably perform multiple steps of GD updates without reapplying derivative estimation. Based on these two contributions, we introduce the zeroth-order optimization with trajectory-informed derivative estimation (ZoRD) algorithm for query-efficient ZO optimization. We theoretically demonstrate that our trajectory-informed derivative estimation and our ZoRD algorithm improve over existing approaches, which is then supported by our real-world experiments such as black-box adversarial attack, non-differentiable metric optimization, and derivative-free reinforcement learning.