Policy-Based Self-Competition for Planning Problems
{kind=link}
Abstract
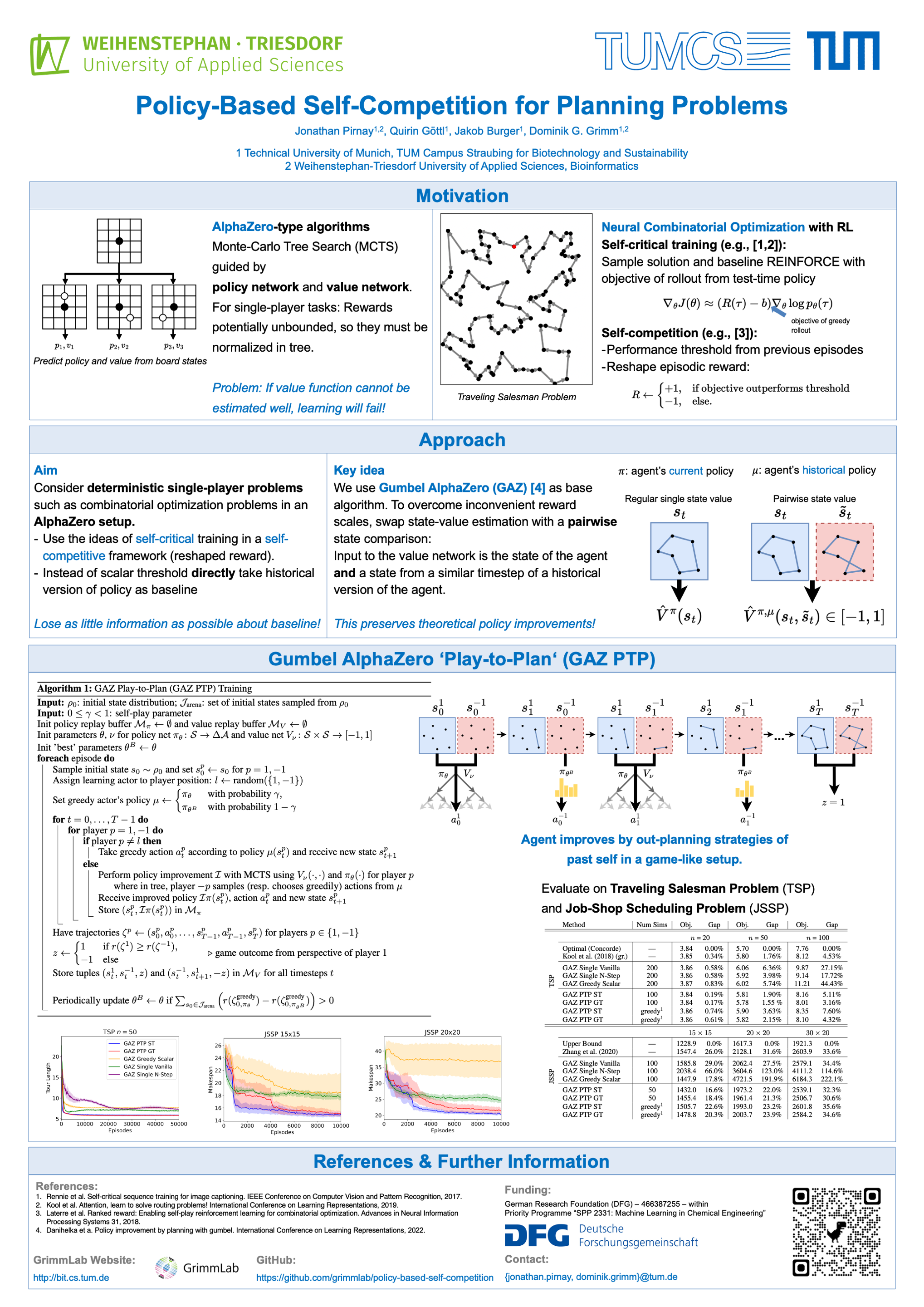
AlphaZero-type algorithms may stop improving on single-player tasks in case the value network guiding the tree search is unable to approximate the outcome of an episode sufficiently well. One technique to address this problem is transforming the single-player task through self-competition. The main idea is to compute a scalar baseline from the agent’s historical performances and to reshape an episode’s reward into a binary output, indicating whether the baseline has been exceeded or not. However, this baseline only carries limited information for the agent about strategies how to improve. We leverage the idea of self-competition and directly incorporate a historical policy into the planning process instead of its scalar performance. Based on the recently introduced Gumbel AlphaZero (GAZ), we propose our algorithm GAZ ‘Play-to-Plan’ (GAZ PTP), in which the agent learns to find strong trajectories by planning against possible strategies of its past self. We show the effectiveness of our approach in two well-known combinatorial optimization problems, the Traveling Salesman Problem and the Job-Shop Scheduling Problem. With only half of the simulation budget for search, GAZ PTP consistently outperforms all selected single-player variants of GAZ.