SYNC: SAFETY-AWARE NEURAL CONTROL FOR STABILIZING STOCHASTIC DELAY-DIFFERENTIAL EQUATIONS
{kind=link}
Abstract
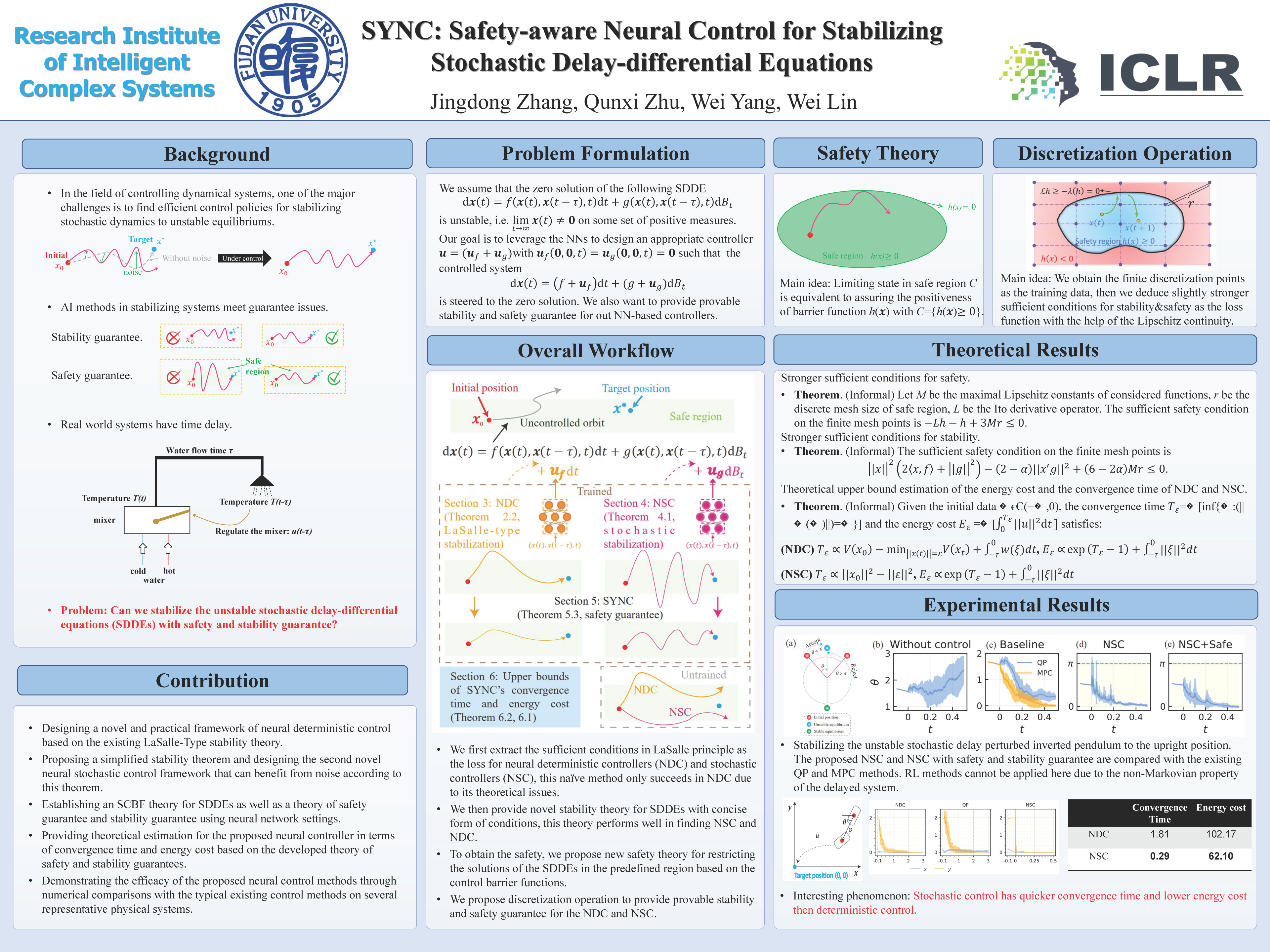
Stabilization of the systems described by \textit{stochastic delay}-differential equations (SDDEs) under preset conditions is a challenging task in the control community. Here, to achieve this task, we leverage neural networks to learn control policies using the information of the controlled systems in some prescribed regions. Specifically, two learned control policies, i.e., the neural deterministic controller (NDC) and the neural stochastic controller (NSC), work effectively in the learning procedures that rely on, respectively, the well-known LaSalle-type theorem and the newly-established theorem for guaranteeing the stochastic stability in SDDEs. We theoretically investigate the performance of the proposed controllers in terms of convergence time and energy cost. More practically and significantly, we improve our learned control policies through considering the situation where the controlled trajectories only evolve in some specific safety set. {\color{black} The practical validity of such control policies restricted in safety set is attributed to the theory that we further develop for safety and stability guarantees in SDDEs using the stochastic control barrier function and the spatial discretization}. We call this control as SYNC (\textbf{S}afet\textbf{Y}-aware \textbf{N}eural \textbf{C}ontrol). The efficacy of all the articulated control policies, including the SYNC, is demonstrated systematically by using representative control problems.