Outcome-directed Reinforcement Learning by Uncertainty \& Temporal Distance-Aware Curriculum Goal Generation
{kind=link}
Abstract
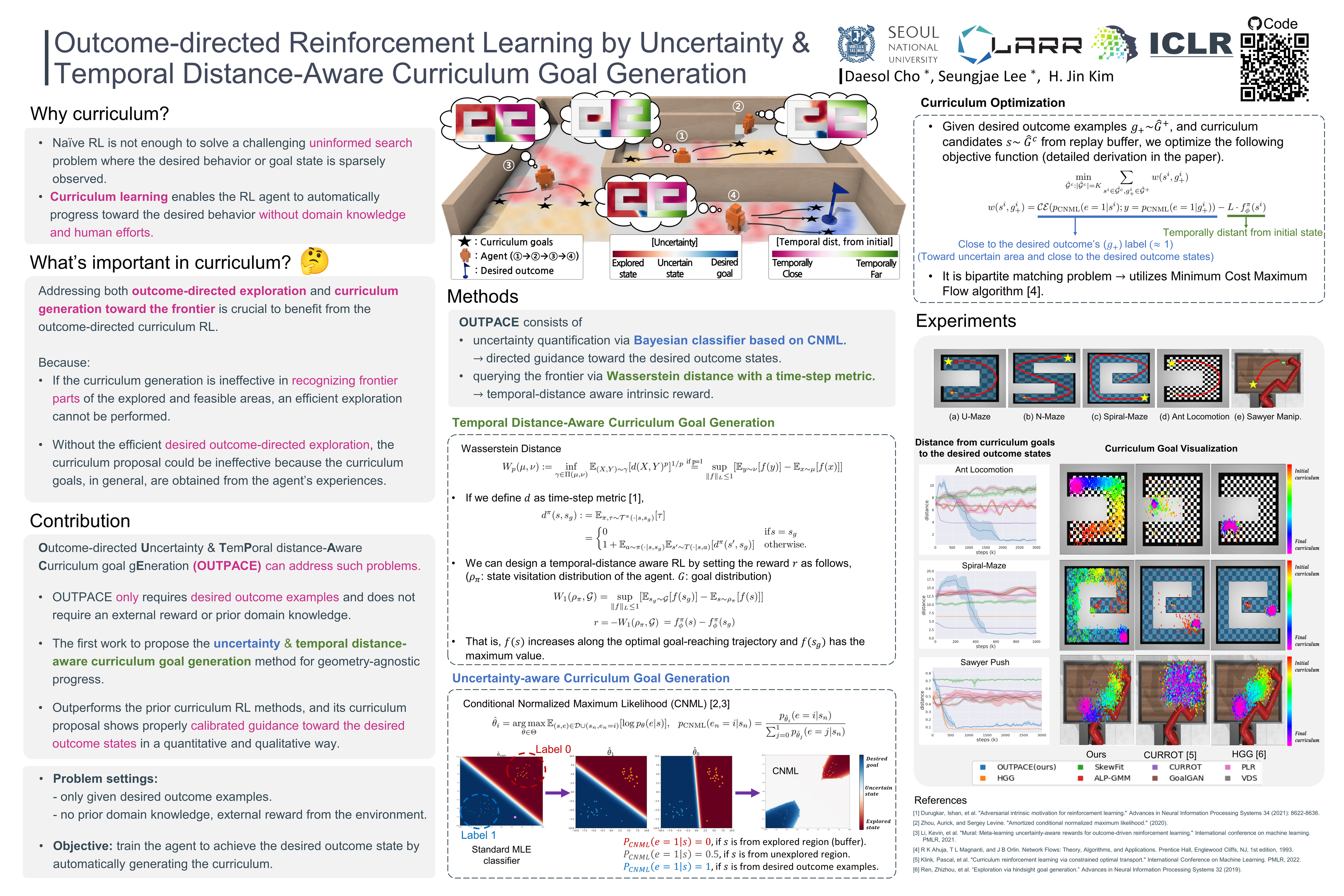
Current reinforcement learning (RL) often suffers when solving a challenging exploration problem where the desired outcomes or high rewards are rarely observed. Even though curriculum RL, a framework that solves complex tasks by proposing a sequence of surrogate tasks, shows reasonable results, most of the previous works still have difficulty in proposing curriculum due to the absence of a mechanism for obtaining calibrated guidance to the desired outcome state without any prior domain knowledge. To alleviate it, we propose an uncertainty & temporal distance-aware curriculum goal generation method for the outcome-directed RL via solving a bipartite matching problem. It could not only provide precisely calibrated guidance of the curriculum to the desired outcome states but also bring much better sample efficiency and geometry-agnostic curriculum goal proposal capability compared to previous curriculum RL methods. We demonstrate that our algorithm significantly outperforms these prior methods in a variety of challenging navigation tasks and robotic manipulation tasks in a quantitative and qualitative way.