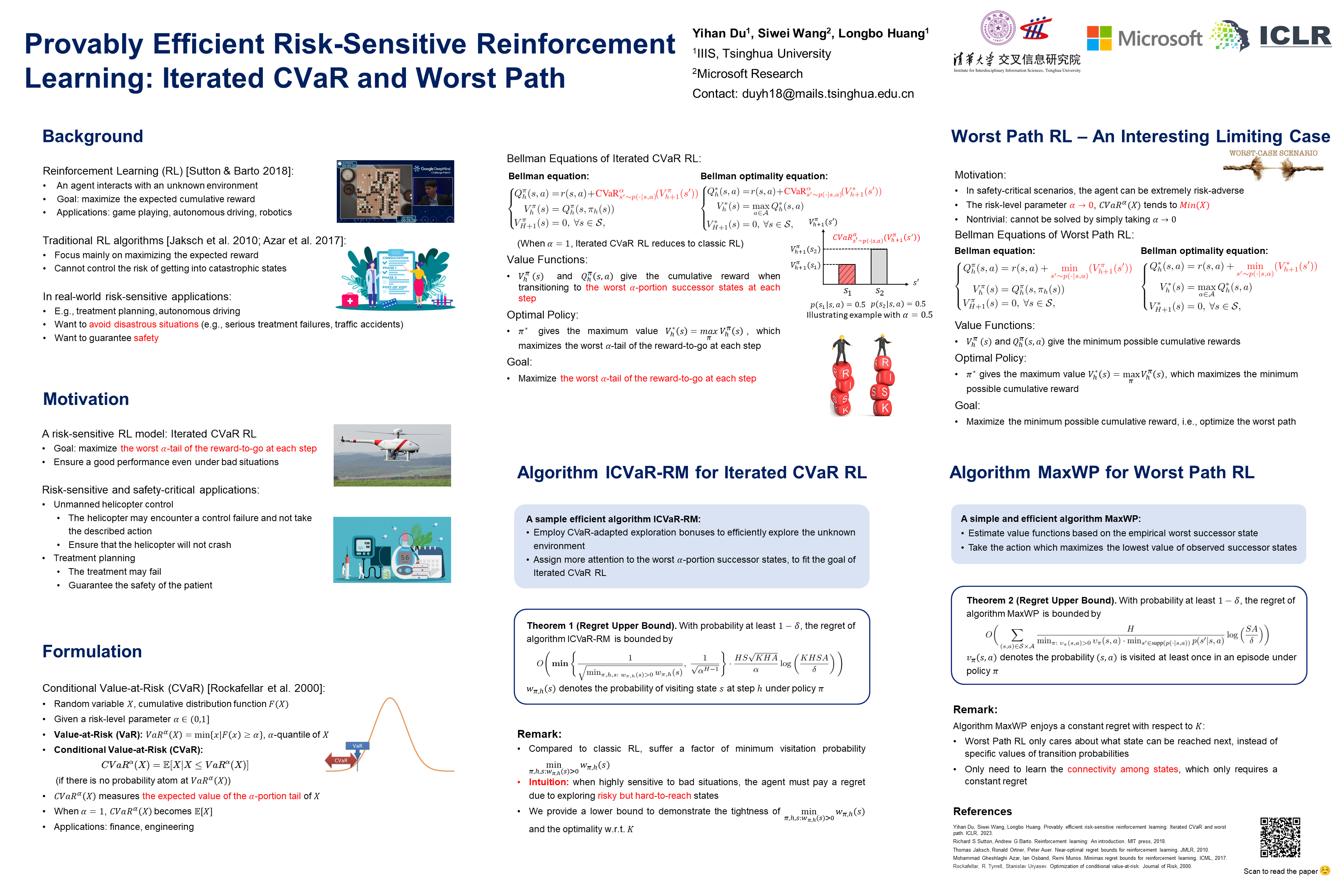
Provably Efficient Risk-Sensitive Reinforcement Learning: Iterated CVaR and Worst Path
Yihan Du ⋅ Siwei Wang ⋅ Longbo Huang
Keywords:
Risk-sensitive Reinforcement Learning (RL)
RL Theory
Worst Path RL
Iterated CVaR RL
Reinforcement Learning
2023 In-Person Poster presentation / poster accept
{kind=link}
Abstract
In this paper, we study a novel episodic risk-sensitive Reinforcement Learning (RL) problem, named Iterated CVaR RL, which aims to maximize the tail of the reward-to-go at each step, and focuses on tightly controlling the risk of getting into catastrophic situations at each stage. This formulation is applicable to real-world tasks that demand strong risk avoidance throughout the decision process, such as autonomous driving, clinical treatment planning and robotics. We investigate two performance metrics under Iterated CVaR RL, i.e., Regret Minimization and Best Policy Identification. For both metrics, we design efficient algorithms ICVaR-RM and ICVaR-BPI, respectively, and provide nearly matching upper and lower bounds with respect to the number of episodes $K$. We also investigate an interesting limiting case of Iterated CVaR RL, called Worst Path RL, where the objective becomes to maximize the minimum possible cumulative reward. For Worst Path RL, we propose an efficient algorithm with constant upper and lower bounds. Finally, the techniques we develop for bounding the change of CVaR due to the value function shift and decomposing the regret via a distorted visitation distribution are novel, and can find applications in other risk-sensitive online learning problems.
Video
Chat is not available.
Successful Page Load