Place Field Representation Learning During Policy Learning
{kind=link}
Abstract
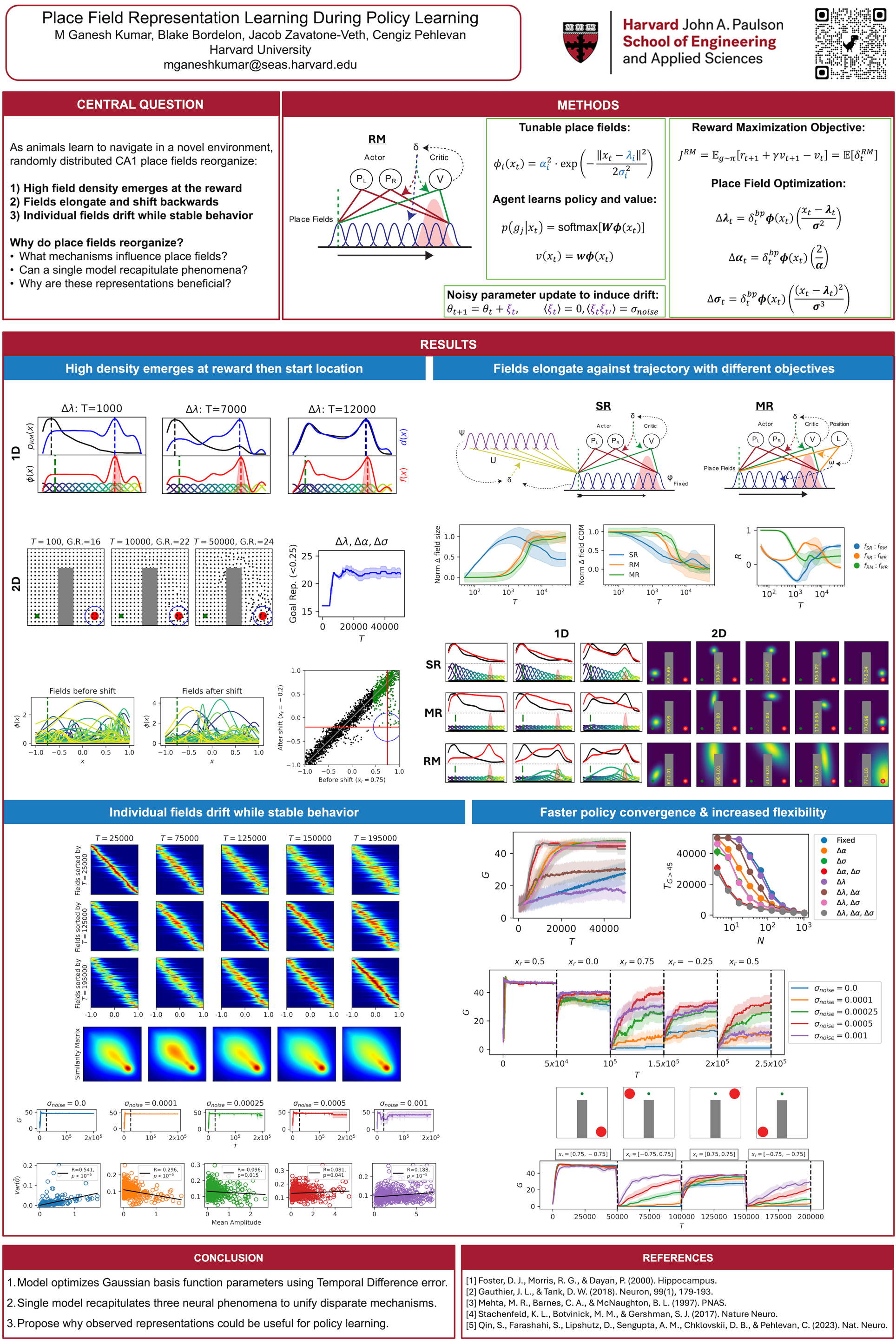
When rodents learn to navigate in a novel environment, a high density of place fields emerges at reward locations, fields elongate against the trajectory, and individual fields change spatial selectivity while demonstrating stable behavior. Why place fields demonstrate these characteristic phenomena during learning remains elusive. We develop a normative framework using a reward maximization objective, whereby the temporal difference (TD) error drives place field reorganization to improve policy learning. Place fields are modeled using Gaussian radial basis functions to represent states in an environment, and directly synapse to an actor-critic for policy learning. Each field's amplitude, center, and width, as well as downstream weights, are updated online at each time step to maximize cumulative reward. We demonstrate that this framework unifies three disparate phenomena observed in navigation experiments. Furthermore, we show that these place field phenomena improve policy convergence when learning to navigate to a single target and relearning multiple new targets. To conclude, we develop a normative model that recapitulates several aspects of hippocampal place field learning dynamics and unifies mechanisms to offer testable predictions for future experiments.